Palabras claves
álgebra de lie,
grupo de lie,
variedad diferenciable,
Variedad topológica
manifold,
Variedad Suave
Particular Ejemplo $Sl_2(R,·)$
Ejemplos Estructuras Suaves
mapeo grupos,
plano tangente,
algebra de lie asociada,
función diferenciable,
punto neutro,
superficie lisa tridimensional,
Conmutadores Algebra Lie $\mathfrak{\Large g}$
representación algebra de lie
Resumen
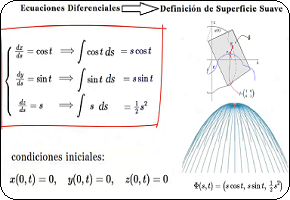
El propósito de este artículo es definir un enfoque geométrico del Algebra de Lie en el espacio euclidiano. Se presenta a continuación una definición del Algebra de Lie a partir de un Grupo de Lie G, en tanto es una variedad diferenciable topológica o una Variedad Suave, utilizando la misma operación binaria propia Corchete de Lie.
El primer enfoque de definición es matricial que está basado en las rotaciones con los generadores infinitesimales y Levi-Civita (Ver Algebra de Lie - Definición)..
1
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Estos grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\mathfrak{so}(n) \equiv \mathfrak{g}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. (Ver Aproximación Infinitesimal de las Rotaciones Pasivas)
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
Grupo de Lie $G$ $\longrightarrow$ Algebra de Lie $\large{\mathfrak {g}}$141
Introducción
Otro enfoque de la definición del Algebra de Lie, es a partir de un Grupo de Lie $G$ 81, en tanto es una variedad diferenciable114 topológica o una Variedad Suave ("Manifold" o superficie como un plano, un círculo, una esfera, u otras superficies suaves en diferentes dimensiones) 105
Por tanto, un Grupo de Lie $(G,·)$ es:
i) Un grupo dotado de una operación binaria 80;
ii) Adicionalmente, $G$ es una variedad topológica suave diferenciable, con una operación binaria propia (Corchete de Lie) que mapea, como se describe a continuación:
En los párrafos a continuación, se intentará mostrar que a partir de esta relación $[·,·]:G \times G \longrightarrow G$, es posible identificar un espacio tangente $\varphi()$ a $G$ evaluado sobre el elemento neutro, y obtener un espacio vectorial de dimensión finita, el cual es trabajable infinitisimalmente como General Linear Groups y asociar su álgebra de Lie $\mathfrak{\large g}$.
Habitualmente se denota con $\large{\mathit e} \in G$ el elemento neutro del grupo y con notación multiplicativa la operación del grupo.
Variedad topológica ~ Manifold
El concepto topológico de variedad bidimensional es un abstracción matemática del cotidiano concepto de superficie, que conocemos en un hoja de papel, un tabla delgada de madera, un lamina metálica, un banda rectangular, etc.. Es decir, estos objetos topológicos responden a la Geometría Euclidiana. Lo interesante es que la comprensión y extensión a espacios $\mathbb R^n$ del concepto de variedad, se realiza a través de superficies. Nótese que la ventaja de la generalización de $\mathbb R^2 \longrightarrow \mathbb R^n$, es que todas las versiones de $\mathbb R$ tienen la misma estructura topológica.
Hoja de Papel
Tabla de Madera
Lamina Metálica
Banda de Cartulina
Curvas sobre la Superficie ~ Esfera de Bloch
Variedad Diferenciable
Los objetos geométricos son denominados Variedades Diferenciables cuando pueden ser tratados mediante
el Cálculo Diferencial e Integral. Es decir, deben ser espacios donde la diferenciación e integración sea aplicable.
Tanto en en geometría como en topología, una variedad diferenciable es un tipo especial de variedad topológica, a la que podemos extender desarrolllos del cálculo diferencial que se usan en $\mathbb {R}^{n}$.
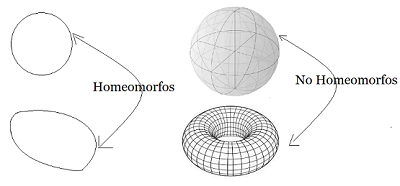
Manifolds: Concepto Homeomorfos y No Homeomorfos
Esto significa que una variedad diferenciable es un espacio topológico, homeomorfo, -(más exactamente difeomorfo: lo que implica que dadas dos variedades $\mathcal {M}$ y $\mathcal {N}$, una aplicación $f:\mathcal {M} \to \mathcal {N}$ es un difeomorfismo si es un homeomorfismo diferenciable con inversa diferenciable)-, a un espacio euclideo.
De hecho, los espacios euclideos son en sí mismo Variedades Diferenciables, como propiamente tal sus curvas y superficies regulares.
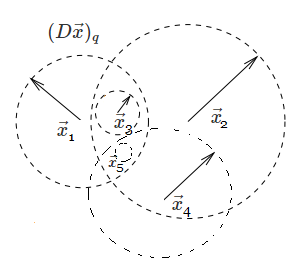
Efectivamente, un subconjunto $M \subseteq \mathbb R^3$ se dice que es una superficie regular si para cualquier punto $p\in M$ existe un entorno $V$ de $p$ en $\mathbb R^3$ y una aplicación $\vec x : U \subset \mathbb R^2 \longrightarrow V \subseteq M$ de un abierto $U$ de $R^2$ sobre $M$, tales que:
i) $\vec x$ es un homeomorfismo diferenciable y;
ii) la diferencial $(D \vec x)_{q}:\mathbb R^2 \longrightarrow \mathbb R^3$
es inyectiva en todo punto $q \in U$.
A la aplicaciónn $\vec x$ se le denomina parametrización de $\mathcal M$ en $p$. La consecuencia
más importante de la definición de superficie regular es el hecho de que el cambio
de parámetros es un difeomorfismo. Por consiguiente, una superficie regular es, intuitivamente, una unión de abiertos de $\mathbb R^3$ organizados de tal forma que cuando dos de tales abiertos se intersectan la transición se puede realiza diferenciando. (La intersección finita de abiertos es un abierto)
Dada una familia indizada de la forma $\unicode{123}A_{i}\subset \mathcal M, I=1,2,3,\dots\unicode{125}$, con $A_i \subset \mathcal M$ se define:
Intersección de Abiertos ~ Transición Diferenciando.
Como consecuencia, tiene sentido hablar, en una superficie regular, de funciones diferenciables y aplicar los métodos del Cálculo Diferencial.
Variedad Suave
Nótese que tanto el producto vectorial $G \times G$ es una variedad topológica suave y $G$ es una variedad suave también, por tanto, se tiene un mapeo sobre variedades suaves, donde se garantiza una función inversa $inv:G \times G \longrightarrow G$ con $g \mapsto g^{-1}$, que también es una variedad suave. Las álgebras de Lie obtenidas están rodeadas de gran cantidad de información sobre sus grupos de Lie asociados.
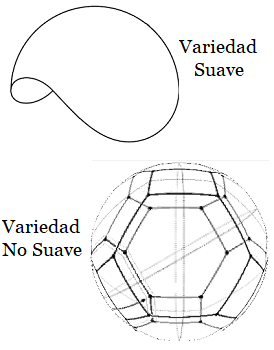
En términos simples, una variedad es suave cuando la superficie no tiene quiebres y es homeomorfa146 a un parche en $\mathbb R^n$.
Variedad Suave (o lisa) vs Variedad No Suave (quebrada)
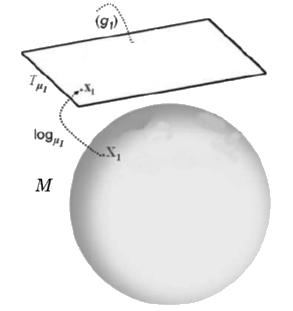
Es importante señalar que, a partir de la previa definición de Variedad Topológica Suave, existen tipos de variedades definidas por determinadas métricas. Por ejemplo, la de Bernhard Riemann, cuya definición implica que se define un producto interior $g_{p}:T_{p}M×T_{p}M\mapsto \mathbb R$ en cada uno de los espacios tangentes $T\times M \text{ de } \mathcal{M}$. Donde equivalentemente la suavidad de $g$, se refiere a todo espacio vectorial $\unicode{123}X,Y\unicode{125}$, cuya aplicación $x \mapsto g_x (X_x, Y_x)$ es suave. De ahí que $\mathbb R^n$ puede ser visto como una variedad Riemanniana bajo la operación producto interno de espacio euclídeo. (Ver Lee, John M. Introduction to smooth manifolds/ John M. Lee New York : Springer, cop. 2003,- Riemannian Manifolds-, Capítulo 13 página 327)
Ejemplo Clasificación: Riemannian Manifolds
Ejemplos Estructuras Suaves
Por ejemplo, el grupo $G=(\mathbb R^n,+)$ tiene una estructura suave, porque si se operan dos vectores de $\mathbb R^n$ se obtiene la suma de esos dos vectores, el cual es un vector resultante suave. Por otro lado, si aplica la función de multiplicar por $-1$ es también una función suave. De modo que $(\mathbb R^n,+)$ es un grupo de Lie, abeliano y también llamado grupo n-dimensional de traslación.
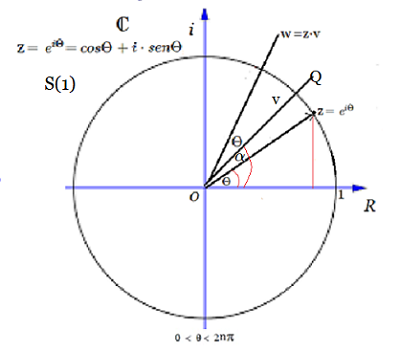
Otro ejemplo simple de estructura suave es $S(1)=\unicode{123} z \in \mathbb {C} \text{ / } |z|=1 \unicode{125}$ que es un círculo unitario, donde $z_{\theta}$ es un grupo de Lie de rotación pasiva.
Sea $\mathbf {z_{\theta}}$ el operador lineal que utilizaremos en el ejemplo, el cual lo aplicamos a un vector cualquiera definido en el plano complejo $\mathbb {C}$ de la figura, de la forma $\mathbf {\vec v}=\overline {OQ}$ de ángulo $\alpha$. Es decir,
al multiplicarlo vectorialmente por $\mathbf{\vec {z}}$, será rotado en un ángulo $\theta$, obteniendo un vector resultante $\mathbf{\vec w} $ cuyo ángulo con respecto al eje de la $x$, será de $\theta + \alpha$:
$$ \mathbf {\vec w = \vec z· \vec v} \text{, donde } \mathbf{|w|=|zv|=|v|}\\ \text{, dado que } \mathbf{|z|}=1$$
Sea $v= \mathbf{e}^{i\alpha}\Rightarrow z· w = {e}^{i(\theta + \alpha)}$
Grupo de Lie Conmutativo en $S(1)$ ~ $U(1)$
En general, en toda la serie de publicaciones acerca del tema (Ver Mapa Publicaciones), me he centrado en los Grupos de Lie que operan con matrices $n \times n$, tanto en los reales como en los complejos y cuya determinante es diferente de cero, donde el producto de estas matrices es también un ejemplo de variedad suave.
Es decir, matrices invertibles ($G=\unicode{123} M \in SO(n) \text{/} det(M)\neq 0 \land M^{T}M=M^{T}M=I\unicode{125}$), las cuales son globalmente clasificadas como $GL(n,\mathbb R)$ (General Linear Groups):
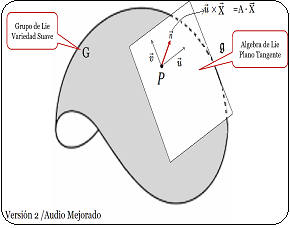
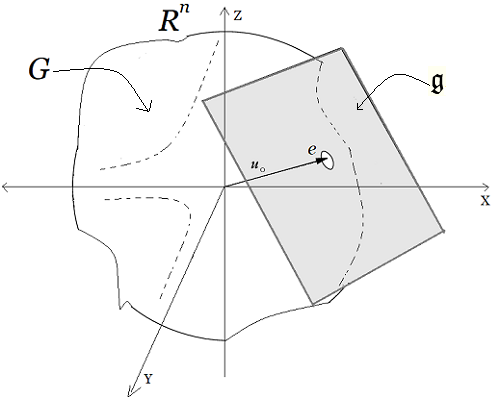
En la figura, se representa una superficie que tiene la estructura algebraica de un grupo.
Por tanto, si se toma un par de elementos $g_1,g_2$ de esa variedad $G$ y se aplica su correspondiente operación binaria, se obtendrá una resultante $g_3$, que también pertenece a la variedad $G$, i.e. $g_1 · g_2=g_3, \text{ donde } \forall g_1,g_2,g_3 \in G$.
Grupo $(G,·)$: Operación elementos $g_1,g_2,g_2\in G$
Así mismo, encontramos el elemento Identidad e $\in G$ , sobre el cual se saca el plano tangente de la superficie.
Este plano tangente es un Algebra de Lie $\large{\mathfrak {g}}$, cuyos generadores infinitesimales son el conjunto de matrices $\vec P=\unicode{123}X,Y,Z\unicode{125}$ y sus relaciones de conmutación. (Ver Generadores $SO(3)$)
Luego, desde una perspectiva de la geometría euclídea este grupo especial $G$ se conecta con un Algebra de Lie mediante el espacio tangente al punto Identidad de $G$, utilizando la operación binaria, - previamente definida -, Corchetes de Lie, i.e. se satisfacen las propiedades de ser bilineal, antisimétrica y cumplir con identidad de Jacobi.
En otras palabras, $G$ es un grupo de Lie, su Algebra de Lie, es el espacio tangente en la identidad $I$.
Geométricamente la operación binaria corchete de Lie surge ahí de manera natural entre campos de vectores, i.e. $[X Y] = XY - Y X$ mide la variación de la variable $Y$ cuando se desplaza por las curvas integrales de $X$.
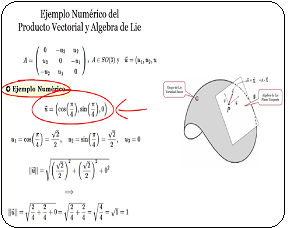
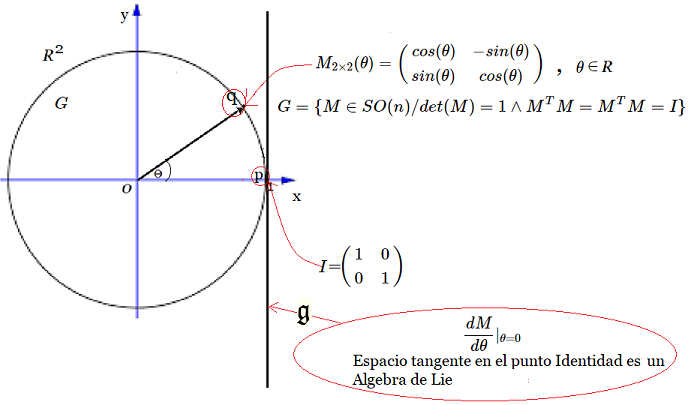
La figura muestra un círculo contenido en $\mathbb R^2$, con un vector longitud $1$ y ángulo $\theta$, donde el punto $q$ tiene asociada la matriz $M_{2 \times 2}(\theta)$, - que es la operador de rotación que constituye un Grupo de Lie en $SO(2)$ -, y la recta tangente en el punto $p=(1,0)$, - que corresponde al elemento Identidad -. Luego, la recta tangente es un Algebra de Lie $\large{\mathfrak {g}}$.
Particular Ejemplo $Sl_2(\mathbb R,·)$
Inicialmente se demostrará que $Sl_2$ (Linear Special Group) definido sobre el cuerpo $\mathbb R^2$, es un grupo de matrices especial dado que su determinante es uno, bajo la multiplicación. Posteriormente se probará que $Sl_2$ tiene asociada un Algebra de Lie.
En general, las matrices $M \in Sl(n)\text{ sobre } \mathbb R^n$ se clasifican con el término especial, dado que por definición su $det(M)=1$. Además, en su transformación sobre $\mathbb R^n$, los elementos de $Sl(n)$ conservan tanto el volumen como su orientación. $Sl_2$ se define como el siguiente conjunto:
iv) Existe una matriz inversa, tal que $\forall M \in Sl_2, M·M^{-1} = M^{-1}·M =I$
$\begin{pmatrix}
a & b\\
c & d\\
\end{pmatrix}\begin{pmatrix}
x & y\\
z & w\\
\end{pmatrix}=
\begin{pmatrix}
1 & 0\\
0 & 1\\
\end{pmatrix}
$
$\Rightarrow$
Aplicando el cálculo de la inversa mediante el método de la matriz adjunta139 de $2\times 2$
$M^{-1}= \frac{1}{det(M)}· \text{adj}(M)$,
se tiene que la $det(M)=1$ y la adjunta es
$\begin{pmatrix}
d & -b\\-c & a\\\end{pmatrix}$,
cuya determinate $det(adj(M^{-1}))=da-bc=1$, i.e.
$M^{-1}=\begin{pmatrix}
d & -b\\-c & a\\\end{pmatrix}$, donde $det(M^{-1})=\begin{vmatrix}
d & -b\\-c & a\\\end{vmatrix}=1$
Por consiguiente, $\exists M^{-1}$ inversa, tal que $\forall M \in Sl_2, M·M^{-1}= M^{-1}·M =I$
__________________________
Por tanto,$Sl_2$ es un grupo.
QED //
__________________________
Nota.- Así mismo, $Sl_2(\mathbb R) $ es un grupo de Lie de dimensión $4$, dado que es un subgrupo de $GL(n,\mathbb R)$ sobre el campo de los números reales. Nótese que el conjunto de todas las matrices $M_n(\mathbb R)$ de $n\times n $, forman un espacio vectorial real de $n^2$. El subconjunto $GL(n,\mathbb R)$ consiste de aquellas matrices cuya determinante es diferente de cero. $[B61]$
Observación: $\large{\exists}\ M\in Sl_2$, donde $M\notin SO(2)$
Nótese que el conjunto de transformaciones $Sl_2$ es un grupo lineal especial, pero no es un Grupo de Lie en $SO(2)$ (i.e. no todas sus matrices pertenecen al conjunto 'Special Ortogonal of Order 2', porque existen matrices $M \in Sl_2$ que no son ortogonales).
Por ejemplo la siguiente matriz no unitaria.
Sea $A=\begin{pmatrix}
1 & -3\\
0 & 1\\
\end{pmatrix}\in Sl_2$, que tiene por determinante $det(A)=1\neq 0$, su transpuesta es:
Es decir, $A\in Sl_2$ no es un grupo de Lie en $SO(2)$, dado que $A^{T}\neq A^{-1}$, o dicho de otra manera $AA^{T}=10\neq I$. i.e. no es ortogonal.
$\mathit {SO(2)\subset Sl_2}$
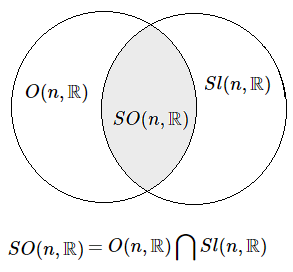
Los grupos especiales como $SO(n)$ son intersecciones de un grupo padre ("parent method from a child class") adecuado y el grupo lineal especial $Sl(n)$:
$$
SO(n,\mathbb R)=O(n,\mathbb R)\bigcap Sl(n,\mathbb R)\\
$$
Donde, $O(n,R)$ es el conjunto de matrices ortogonales sobre $\mathbb R$
y de ese modo heredar algunas características de ambos grupos.
La definición del grupo ortogonal $O(n)$ caracteriza la geometría euclidiana, i.e. la geometría en $\mathbb R$ bajo transformaciones de longitudes y ángulos preservados invariantes.
En el caso del grupo lineal especial de $Sl(n)$, su característica geométrica en $\mathbb R$ bajo transformaciones es conservar invariante una forma de volumen.
Ahora, si consideramos por ejemplo el conjunto de matrices de la forma:
$$M=\begin{pmatrix}
cos(\theta) & -sin(\theta)\\sin(\theta) & cos(\theta)\\\end{pmatrix}
$$
Donde $\theta\in \mathbb R \quad \Rightarrow M$ es un Grupo de Lie en $SO(2)$, dado que $det(A)=1 \land A^{T}=A^{-1}$, i.e. las matrices $M$ son especiales y ortogonales. 109
$\large{Sl_2}$ es un grupo de Lie muy representativo y se presta para generar un Algebra de Lie, como así mismo para
ilustrar su estructura algebraica son sus elementos de transformación lineal mediante la llamada Teoría de las Representaciones, la cual será mencionada al fin de esta demostración 150.
Desde esta conformación de grupo $Sl_2 \in GL(\mathbb R^2,\text{·})$, se define como el conjunto de matrices de $2 \times 2$ cuyas determinantes son igual a uno, - rotulada como $(AL1)$. A este grupo de Lie $Sl_2$, es posible asociarle un Algebra de Lie $\mathfrak g$, mediante una aproximación geométrica.
Nota.- Téngase presente que cualquier Algebra de Lie es por definición un espacio vectorial con un producto (el conmutador) que satisface las propiedades de ser bilineal, antisimétrica y cumplir con la identidad de Jacobi.
Aún más, dada la definición de $Sl_2$ es importante recordar que la determinante de una matriz cuadrada es un polinomio de sus entradas, por lo que es infinitamente diferenciable.142
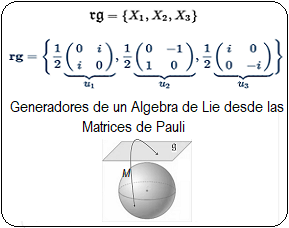
A continuación se mostrará que desde $Sl_2 \times Sl_2 \longrightarrow Sl_2$, de obtienen tres generadores de $\large{\mathfrak {g}}$, i.e. $Sl_2=\pmb{span\unicode{123}E,F,H\unicode{125}}$,- (Esa es la notación estándard, aquí se utilizará la notación $\pmb{\mathfrak{rg}=\unicode{123}g_1,g_2,g_3\unicode{125}}$). Estos generadores son matrices unitarias que van a ser conmutadas con la operación binaria corchetes de Lie, resultando $\large{\mathfrak {g}}$ es el conjunto de matrices antisimétricas, que llamaremos Algebra de Lie del grupo $Sl_2$:
$$\large{\mathfrak {g}}=\unicode{123} M \in \mathbb{R^n} \text{ / }
\underbrace{M^T=-M}_{\text{Antisimetría}} \unicode{125}$$
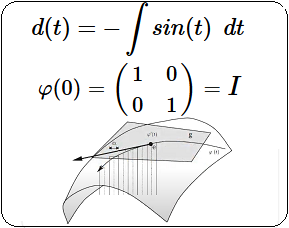
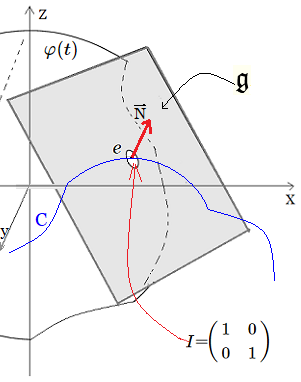
En efecto, si parametrizamos los elementos de la matriz $M$ en $(AL1)$ como $a(t),b(t),c(t),d(t)$, i.e. con una función diferenciable $\varphi(t) \in Sl_2(\mathbb R)$, entonces se puede asumir que existe una curva $C$ que se desplaza sobre la superficie lisa del objeto.
Luego, bosquejamos en la figura#1 una curva $C$ continua y diferenciable que se desliza sobre esa (manifold) superficie suave tridimensional:
Fig#1 $\large{\varphi(t)}$: Curva $C$ sobre Variedad Suave
Entonces, $(AL1)$, en términos paramétricos se expresa con la siguiente la matriz:
$$\varphi(t)=\begin{pmatrix}
a(t) & b(t)\\c(t) & d(t)\\
\end{pmatrix}\qquad\quad \bbox[FFFFE0]
{(AL2)}$$
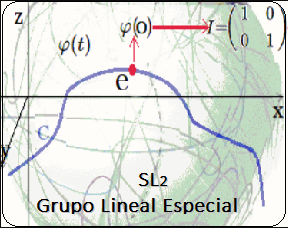
Es decir, se asume que esta función $\varphi(t)$ del grupo $Sl_2$, determina una curva sobre la variedad en el plano 3-dimensional euclidiano, de modo que tiene un punto neutro igual a la idéntica. (Ver figura #2)135
Luego, al evaluar la derivada $\varphi(t)$ de la función en el punto identidad $I$, se genera un plano tangente a la variedad en ese punto, y consecuentemente un Algebra de Lie asociada. Es decir, el Algebra de Lie de un Grupo de Lie, es definido como el espacio tangente en la identidad.
Ilustremos su demostración:
Sea $X=\begin{pmatrix}
x & y\\z & w\\
\end{pmatrix}
$, el conjunto de matrices de $2\times 2$ que genera un álgebra de Lie $\mathfrak g$.
Nota.- En otras palabras, la matriz $X$ generadora del Algebra de Lie $\mathfrak g$ es la derivada de la función $\varphi(t)$ evaluada en $t=0$, por tanto $\unicode{123}x,y,z,w\unicode{125}\equiv \unicode{123}a'(0),b'(0),c'(0),d'(0)\unicode{125}$. Notación de elementos respectivos, que se utilizarán indistintamente en el presente desarrollo.
Se asume que existe una curva $C$, definida por $\varphi(t)$ , tal que:
$$\varphi(\mathbb R):\longrightarrow Sl_2(\mathbb R)$$
$\Rightarrow$
$$\varphi(t)=\begin{pmatrix}
a(t) & b(t)\\c(t) & d(t)\\
\end{pmatrix}=a(t)d(t)-b(t)c(t)=1\qquad\quad \bbox[FFFFE0]
{(AL4)}
$$
Evaluando la función $\varphi$ en el neutro $e$, i.e. en $t=0$ y sabiendo que $\varphi(0)=I$, tenemos:
Evaluando la derivada $\varphi'(t)$ en $t=0$ y usando $(AL5)$, tenemos:
$$ \underbrace{a'(0)}_{\large{x}} d(0) + a(0)\underbrace{d'(0)}_{\large{w}}-\underbrace{b'(0)}_{\large{y}}c(0)-b(0)\underbrace{c'(0)}_{\large{z}})=0$$
Sustituyendo los valores de $(AL4.1)$, i.e. $a(0)=d(0)=1 \land b(0)=c(0)=0$ en $(AL6)$ y simplificando:
$\unicode{123}E,F,H\unicode{125}$ es una notación estándard equivalente, utilizada en variadas pubilicaciones para referirse a estas tres matrices generadoras $\unicode{123}g_1,g_2,g_3\unicode{125}$.
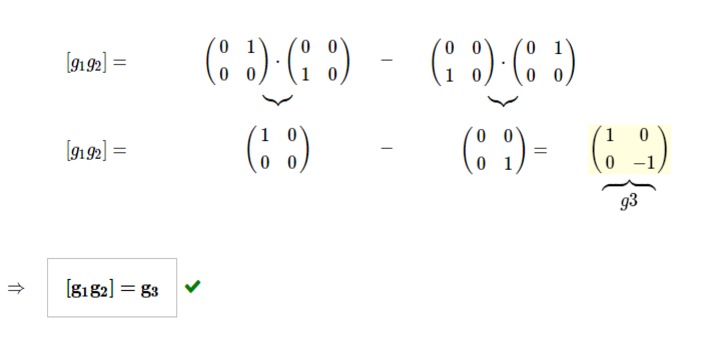
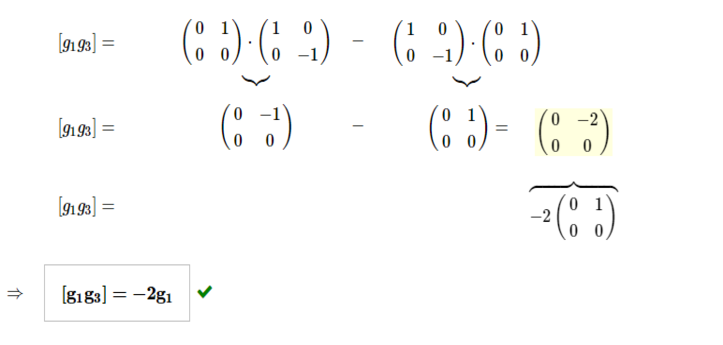
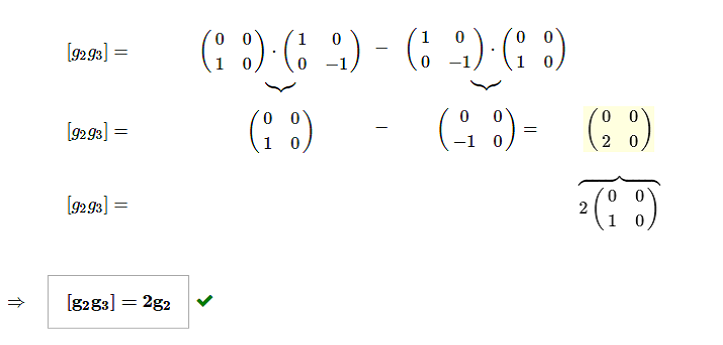
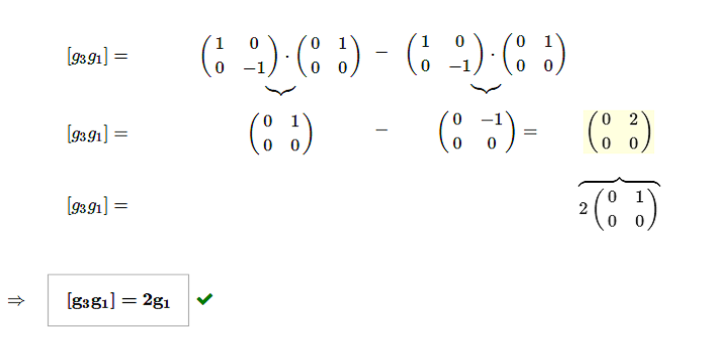
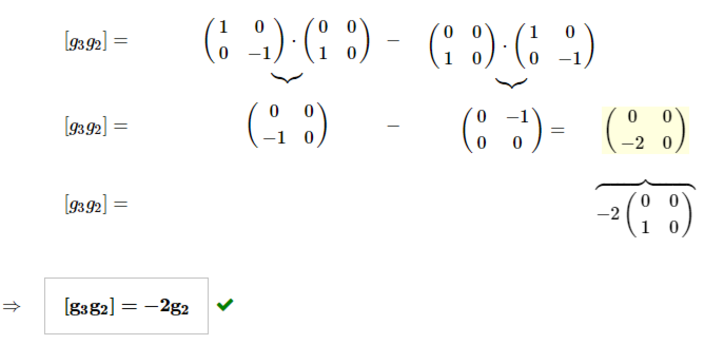
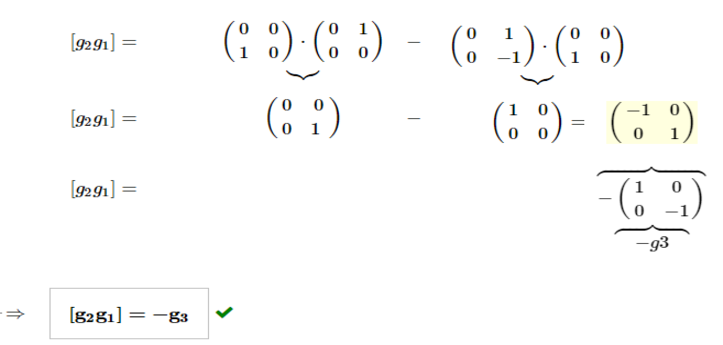
Conmutadores del Algebra de Lie $\large{\mathfrak g}$
Aplicamos al conjunto $\mathfrak{rg}=\unicode{123}g_1,g_2,g_3\unicode{125}$ la operación binaria Corchetes de Lie, $[XY]=XY-YX$, para probar que cumple las propiedades89 requeridas para constituir un Algebra de Lie.
Veremos una síntesis de los resultados en la siguiente tabla:
Tabla con Corchetes de Lie ~ Generadores $Sl_2$
[· , ·]
$\mathbf {g_1}$
$\mathbf {g_2}$
$\mathbf {g_3}$
$\mathbf {g_1}$
$0$
$g_3$
$-2g_1$
$\mathbf {g_2}$
$-g_3$
$0$
$2g_2$
$\mathbf {g_3}$
$2g_1$
$-2g_2$
$0$
Luego, desde un punto de vista de la geometría euclídea este grupo especial $Sl_2$ se conecta con un Algebra de Lie $\mathfrak g$ mediante una representación que llamamos $\mathfrak{rg}$ del espacio tangente al punto Identidad, utilizando la operación binaria, - previamente definida -, Corchetes de Lie, i.e. se satisfacen las propiedades de ser bilineal, antisimétrica y cumplir con identidad de Jacobi.
El grupo lineal especial $Sl\subset G(n)$, se puede generalizar a un Algebra de Lie $\mathfrak{g}$, formada por todas las matrices de $n\times n$, sobre el cuerpo de los reales o complejos y cuya traza es nula.
Particularmente en los reales, $\large{\mathfrak {g}}$ es el conjunto de todas las matrices n-dimensionales antisimétricas, que llamaremos Algebra de Lie del grupo $Sl_n$.
Definida como:
$$\large{\mathfrak {g}}=\unicode{123} M \in \mathbb{R^n} \text{ / }
\underbrace{M^T=-M}_{\text{Antisimetría}} \unicode{125}$$
Cierre de la Demostración
Por tanto, se ha mostrado que desde el
producto vectorial de este grupo de Lie $\mathbf {Sl_2}$ se obtienen tres generadores. Es
decir, $\mathbf {Sl_2=}$span$\unicode{123}\mathbf {E, F, H}\unicode{125}$ o $\mathfrak {\mathbf {rg}}=\unicode{123}\mathbf {g1, g2, g3}\unicode{125}$. Esta última $\mathfrak {\mathbf {rg}}$, es la notación utilizada en este artículo.
Estos tres generadores $\large{\mathfrak {rg}}$ son las matrices unitarias:
resultan en $\large{\mathfrak {g}}$, que es el conjunto de matrices antisimétricas que llamaremos Algebra del Lie del Grupo $\mathbf {Sl_2}$
El ejercicio muestra que $\large{\mathfrak {rg}}$ es un conjunto de vectores del álgebra de Lie que pueden ser utilizados operando con los corchetes de Lie para obtener cualquier elemento del espacio.
En otrós términos, todo elemento del Algebra $\large{\mathfrak {g}}$ puede ser expresado como una combinación lineal de los generadores de base $\large{\mathfrak {rg}}$.
Lo interesante es que $\large{\mathfrak {g}}$ permite estudiar las propiedades del grupo de Lie de una forma más algebraica, i.e. sin recurrir a la propiedades geométricas específicas del grupo, lo que resulta especialmente útil en el estudio de los grupos de Lie y sus aplicaciones como la Geometría Diferencial y la teoría de representaciones.
La directa y estrecha relación entre el grupo de Lie y su correspondiente álgebra es unívoca.
Esta conexión se manifiesta. - ilustrado en este ejercicio -, entre los generadores de ambas estructuras, i.e. $\large{\mathfrak {rg}}$ y los generadores infinitesimales del grupo de Lie $Sl_2$ 160. (Ver Puertas Cuánticas de Pauli ~ Base de un Algebra de Lie
Otro Ejemplo de Representación de Algebra de Lie
El hecho de que $Sl(n,R)$ sea simple, pone a disposición la teoría de las representaciones de álgebras de Lie para ilustrar en muy buena forma un natural ejemplo de aplicación.
Extendiendo las tres matrices unitarias generadoras del Algebra de Lie asociada, que satisfacen condición $a+d=0$, las cuales se rotulan como span $\unicode{123} H,E,F \unicode{125}$, de donde:
Diagramando y explicando detalladamente una representación de $(AL7)$ con un punto para cada dimensión, (i.e. en 5 dimensiones).
Conectando en dirección hacia la derecha los puntos, después en dirección opuesta y tambien conexión de los puntos consigo mismo.
Posteriormente mostrando como se satisfacen las operaciones de los corcheter de Lie en la representación gráfica.
Representación: $G$ $\longrightarrow$ Algebra de Lie $\large{\mathfrak {g}}$141






 Variedad Diferenciable - Definición Algebra de Lie
Variedad Diferenciable - Definición Algebra de Lie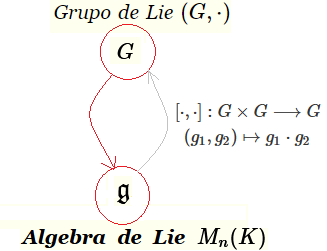


.png)