Introducción
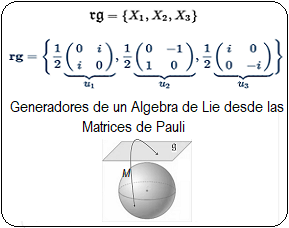
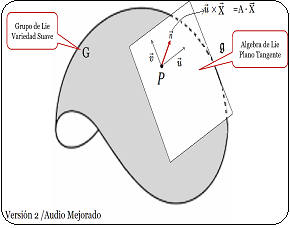
El objetivo de este ejercicio de Sistema de Ecuaciones Diferenciables se explica con dos ejemplos de aplicación de sistemas simultáneos simples asociados a conceptos fundamentales de variedades y de algunas de sus aplicaciones. Estas nociones ayudan a continuar profundizando las ideas de la geometría diferencial y su conexión a los grupos de Lie. (Ver Definición Algebra de Lie Variedad Diferenciable)
En particular, el tratamiento de ecuaciones lineales simultáneas, donde se aplican en ecuaciones diferenciales que solo contienen dos variables.
Nótese que en este tipo de ecuaciones se considera que:
i) Si una de las variables es independiente, las ecuaciones son ecuaciones diferenciales ordinarias (EDO).
ii) Si son independientes más variables, las ecuaciones se llaman ecuaciones diferenciales entre derivadas parciales (EDP).
Se presenta entonces un primer ejercicio recordatorio de sistemas de ecuaciones diferenciales lineales ordinarias con coeficientes constantes, donde estos sistemas el número de ecuaciones simultáneas es igual al número de variables dependientes.
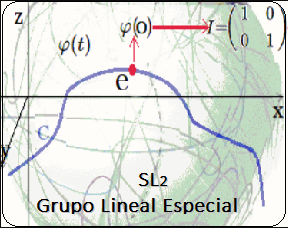
Posteriormente, un segundo ejemplo que muestra cómo una superficie en una variedad diferenciable suave puede dar lugar a un sistema de ecuaciones diferenciales ordinarias lineales con coeficientes constantes, donde las ecuaciones diferenciales modelan la evolución de objetos geométricos en el espacio.
(Ver Ecuación Diferencial Plano Tangente de Sl2 - Grupo Lineal Especial)
Ejemplo 1
|
$$
A\left\{
\begin{array}{c}
\text{ } \\
2\large{\frac{dx}{dt}} + \large{\frac{dy}{dt}} - 4x - y = e^t\quad [1]\\
\text{ } \\
\large{\frac{dx}{dt}} \qquad \text{ } + 3x + y =0\quad [2]\\
\text{ }\\
\end{array}
\right.
$$
|
|
$$
B\left\{
\begin{array}{c}
\large{\frac{dx}{dt}} + \large{\frac{dy}{dt}} + y = 1 \qquad \quad[1]
\text{ }\\
\text{ }\\
\large{\frac{dx}{dt}} - \large{\frac{dz}{dt}}- 2 + z=1 \quad[2]
\text{ }\\
\text{ }\\
\large{\frac{dy}{dt}} +\large{\frac{dz}{dt}}+ y + 2z=0 \quad[3]
\end{array}
\right.
$$
|
A simple vista, derivando $A[2]$ se obtiene:
|
$$
C\left\{
\begin{array}{c}
\large{\frac{dx^2}{dt^2}} + 3\large{\frac{dx}{dt}} + \large{\frac{dy}{dt}}=0
\end{array}
\right.
$$
|
Luego, con las típicas operaciones algebraicas para aislar variables, se multiplica la ecuación $A[1]$ por $(-1)$. Así mismo por $(-1)$ $A[2]$ y se suman con $[C]$, se obtiene una ecuación diferencial de orden $2$.
Es decir, el método de resolución utilizado consiste en derivar las ecuaciones dadas, localizar la ecuación donde es posible eliminar todas menos una de las variables dependientes. En efecto,
$$(-1)·\left( 2 \frac{dx}{dt} + \frac{dy}{dt} - 4x - y \right) \quad = -2 \frac{dx}{dt}-\frac{dy}{dt}+ 4x + y = -\large{e^t}\\
(-1)·\left(\frac{dx}{dt} \qquad \text{ } + 3x + y\right)\quad = -\frac{dx}{dt} -\frac{dy}{dt} -3x - y =0 \\$$
$$\implies$$
$$-3\frac{dx}{dt}-\frac{dy}{dt} + x =-\large{e^t}\\$$
$$\implies$$
$$
\frac{dx^2}{dt^2} + 3\frac{dx}{dt} + \frac{dy}{dt}=0
$$
|
Sumando este resultado con $[C]$, se tiene la ecuación diferencial resultante:
|
$$\frac{dx^2}{dt^2} + x=-\large{e^t}$$
|
Resolución Ejemplo 1
Resolviendo la ecuación homogénea asociada:
$$
\large{\frac{d^2x}{dt^2}} + x = 0
$$
Donde su ecuación característica es de la forma:
$$
\large{r^2 + 1 = 0 \quad \implies \quad r = \pm i}
$$
Donde la solución general de la parte homogénea es:
$$
x_h(t) = C_1\cos t + C_2\sin t
$$
Luego la solución particular por el método de coeficientes indeterminados, bajo el término no homogéneo es $ -e^t $, tiene una solución particular de la forma:
$$
x_p(t) = A e^t
$$
Derivando:
$$
\frac{dx_p}{dt} = A e^t
$$
$$
\frac{d^2x_p}{dt^2} = A e^t
$$
$$\implies$$
$$
A e^t + A e^t = -e^t
$$
$$
2A e^t = -e^t
$$
$$\implies$$
$$
A = -\frac{1}{2}
$$
Por tanto, la solución particular es:
$$
x_p(t) = -\frac{1}{2} e^t
$$
Y la solución general de la ecuación diferencial $x(t)$, - parametrizada con constantes $C_1,C_2 \in \mathbb {R}$ es la suma de la solución homogénea y la solución particular:
$$
x(t) = C_1\cos t + C_2\sin t - \frac{1}{2} e^t
$$
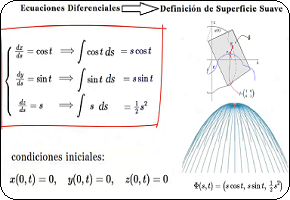
Ejemplo 2
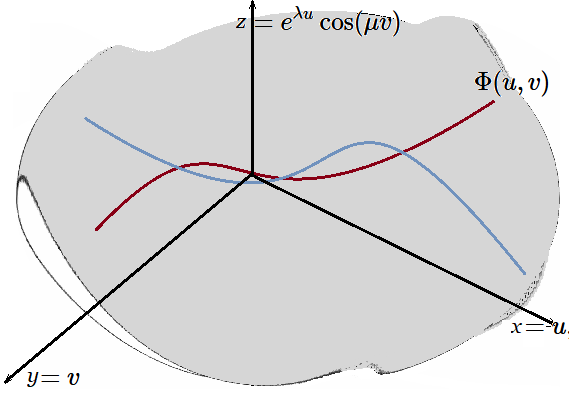
Sea
|
$$
\Phi(u,v) = (x(u,v), y(u,v), z(u,v))
$$
|
Esta expresión define una superficie parametrizada en $\mathbb{R}^3$,
donde:
|
$$
x = u, \quad y = v, \quad z = e^{\lambda u} \cos(\mu v)
$$
|
para algunos parámetros $\large{\lambda, \mu \in \mathbb{R}}$.
Esta expresión define una superficie diferenciable en $\mathbb{R}^3$, que es parte de una variedad diferenciable si se considera dentro de un atlas adecuado.
Ahora, consideremos la ecuación diferencial que explica la evolución de $\large{z}$ en términos de $\large{u}$ y $\large{v}$:
|
$$
\frac{\partial^2 z}{\partial u^2} + \frac{\partial^2 z}{\partial v^2} - \lambda^2 z = 0.
$$
|
Esta es una ecuación en derivadas parciales, pero si restringimos el problema a curvas parametrizadas dentro de la superficie, podemos obtener un sistema de ecuaciones diferenciales ordinarias.
Supongamos una curva en la superficie de la forma:
$$
\gamma(t) = (u(t), v(t), z(t))
$$
donde,
$$
z(t) = e^{\lambda u(t)} \cos(\mu v(t))
$$
|
Derivando respecto a $\large{t}$, se obtiene:
|
$$
\frac{dz}{dt} = \lambda e^{\lambda u} \cos(\mu v) \frac{du}{dt} - \mu e^{\lambda u} \sin(\mu v) \frac{dv}{dt}.
$$
|
Bajo condiciones sobre $\large{u(t)}\quad$ y $\quad\large{v(t)}\quad$ tales como $\large{\frac{du}{dt}} = a u + b v\quad$ y $\quad\large{\frac{dv}{dt}} = c·u + d·v$, obtenemos un sistema lineal de ecuaciones diferenciales.
$$
\begin{cases}
\large{\frac{du}{dt}} = a u + b v, \\
\text{ }\\
\large{\frac{dv}{dt}} = c u + d v, \\
\text{ }\\
\large{\frac{dz}{dt}} = \lambda e^{\lambda u} \cos(\mu v) (a u + b v) - \mu e^{\lambda u} \sin(\mu v) (c u + d v).
\end{cases}
$$
Donde, $a,b,c,d \in \mathbb {R}$
Resolución Ejemplo 2
El sistema lineal de primer orden para $ u(t) $ y $ v(t) $ expresado matricialmente:
$$
\frac{d}{dt} \begin{bmatrix} u \\ v \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix}
$$
Sea $ A $ la matriz de coeficientes:
$$
A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}
$$
Donde, la solución general de este sistema está dada en términos de la matriz exponencial:
$$
\begin{bmatrix} u(t) \\ v(t) \end{bmatrix} = e^{At} \begin{bmatrix} u_0 \\ v_0 \end{bmatrix}
$$
$$ e^{At} \quad \implies e^{At} = P e^{\Lambda t} P^{-1}$$
Siendo $ P $ la matriz de autovectores y $ \Lambda $ la matriz diagonal de autovalores de $ A $. Los autovalores $ \lambda_1, \lambda_2 $ de $ A $ son las raíces del polinomio característico:
$$
\det(A - \lambda I) = \begin{vmatrix} a - \lambda & b \\ c & d - \lambda \end{vmatrix} = (a-\lambda)(d-\lambda) - bc = 0
$$
(Ver Matrices de Pauli ~ Deducción Matemática - Configuración desde Vectores Propios)
Resolviendo esta ecuación cuadrática, obtenemos $ \lambda_1 $ y $ \lambda_2 $, y con ellas la forma explícita de $ u(t) $ y $ v(t) $
Ahora, se resuelv la ecuación para $ z(t) $
Dado que $ z(t) \longrightarrow \gamma(t) = (u(t), v(t)$, entonces $ z(t) $ se puede reescribir en términos de la solución previamente obtenida:
$$
\frac{dz}{dt} = \lambda e^{\lambda u(t)} \cos(\mu v(t)) (a u(t) + b v(t)) - \mu e^{\lambda u(t)} \sin(\mu v(t)) (c u(t) + d v(t))
$$
Esta es una ecuación diferencial de primer orden en $ z(t) $ con un término forzante definido por $ u(t) $ y $ v(t) $.
Luego,
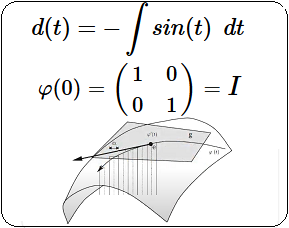
$$
z(t) = \int \left[\lambda e^{\lambda u(t)} \cos(\mu v(t)) (a u(t) + b v(t)) - \mu e^{\lambda u(t)} \sin(\mu v(t)) (c u(t) + d v(t)) \right] dt.
$$
Sustituyendo $ u(t) $ y $ v(t) $ de la solución anterior, se puede resolver la integral explícitamente en términos de funciones exponenciales y trigonométricas, dependiendo de la naturaleza de los autovalores $ \lambda_1 $ y $ \lambda_2 $.
Este es un sistema de ecuaciones diferenciales lineales ordinarias con coeficientes constantes ($\large{a, b, c, d \in \mathbb {R}}$), el cual está asociado a la evolución de la superficie diferenciable dada por $\large{\Phi(u,v)}$.
Conclusión
El artículo, mediante este ejercicio intenta explorar la aplicación de sistemas de ecuaciones diferenciales en el contexto de la geometría diferencial y los grupos de Lie. Se han analizado dos ejemplos clave: el primero centrado en un sistema de ecuaciones diferenciales lineales ordinarias con coeficientes constantes, y el segundo en una ecuación en derivadas parciales asociada a una superficie parametrizada en $\mathbb {R}^3$
En el primer ejemplo, se mostró cómo transformar y resolver un sistema de ecuaciones diferenciales mediante técnicas algebraicas y métodos de solución para ecuaciones homogéneas y no homogéneas. En el segundo, se estudió la evolución de una función sobre una variedad diferenciable y su reformulación como un sistema lineal de primer orden.
Estos resultados proporcionan herramientas fundamentales para el estudio de estructuras matemáticas más complejas, demostrando la interconexión entre ecuaciones diferenciales y geometría diferencial.
 Video Ecuación Diferencial Grupo Lineal Especial Sl2 Video Ecuación Diferencial Grupo Lineal Especial Sl2
|
Videografía y Bibliografía
Ver Artículos del Autor
Ver Videos DocIRS
[B1]
Quantum Computation 5: A Quantum Algorithm
David Deutsch, Autor del Algoritmo
Centre for Quatum Computation
https://www.youtube.com/watch?v=3I3OBFlJmnE
[B2]
Curso Computación Cuántica
Eduardo Sáenz de Cabezón
26 abril 2019
Instituto de Matemáticas de la UNAM, México
https://www.youtube.com/watch?v=KKwjeJzKezw
[B3]
Quantum Optics
Miguel Orszag,
Pontificia Universidad Católica - Santiago de Chile
Editorial Springer ~ 2016
[B4]
Quantum Optics - Mark Fox - Oxford University Press
22 jun. 2006 - Oxford Master Series in Physics.
Capítulo 13
https://www.academia.edu/24696066/
[B5]
Quantum Computing Explain
David McMahon on 2007
WILEY-INTERSCIENCE
A John Wiley & Sons, Inc., Publication
https://www.academia.edu/31537353
/_David_McMahon_Quantum_
Computing_Explained_BookFi_1_
[B6]
Programming a Quantum Computer with Cirq (QuantumCasts)
Dave Bacon
Google
[B7]
Geometría Diferencial
Rolando Alvarado Flores
México
junio ~ 2020
[B8]
Principios
Fundamentales de
Computación cuántica
Vicente Moret Bonillo
Profesor Titular de Universidad. Senior Member, IEEE.
Departamento de Computación. Facultad de Informática.
Universidad de la Coruña
2O13
[B9]
Differential Geometry - Lecture 01
Claudio Arezzo
ICTP Mathematics
17 Nov 2016
[B10]
Quantum computing for the determined
Michael Nielsen on June 10, 2011
http://michaelnielsen.org/blog/
quantum-computing-for-the-determined/
https://www.youtube.com/watch?v=x6gOp_o7Bi8
[B11]
QC — Quantum Algorithm with an example
Jonathan Hui
Dec 6, 2018
[B12]
Grupos de permutaciones
Universidad Abierta y a Distancia de México
Distrito Federal, México, 2015
Yannina Ovalle Rodriguez
[B13]
Programación Cuántica
Francisco Gálvez
T3chFest 2017
IBM
https://www.youtube.com/watch?v=FYAkeCcOgeQ
[B14]
Quantum Computation (CMU 18-859BB, Fall 2015)
Lecture 1: Introduction to the Quantum Circuit Model
September 9, 2015
Lecturer: Ryan O’Donnell Scribe: Ryan O’Donnell
[B15]
Hipertexto: Tratamiento Documental de Datos
José Enrique González Cornejo
Centro de Investigación y Desarrollo de la Educación,
CIDE, Santiago – Chile, 1990.
Registro Nº81.183 - 1991 ~ Editoria Argué Ltda
[B16]
Algoritmo para el Cambio de Base Numérica
José Enrique González Cornejo
DocIRS Technology
Math-Computing Open Academy
Junio 2014
[B17]
Algoritmo, Generación Distribución
Aleatoria Discreta de Suma 1
José Enrique González Cornejo
11 de julio 2012
DocIRS Technology
Math-Computing Open Academy
https://www.docirs.cl/
Algoritmo_Distribucion_Aleatoria.htm
[B18]
Naïve Bayes ~ Simple Algoritmo de Clasificación
Modelo de Variables Discretas
José Enrique González Cornejo
01 de agosto 2019
DocIRS Technology
Math-Computing Open Academy
[B19]
Problema de la Ruta Optima
José Enrique González Cornejo
01 de mayo 2009
DocIRS Technology
Math-Computing Open Academy
[B20]
Nomenclatura DocIRS para la Programación
José Enrique González Cornejo
24 de abril 2009
DocIRS Technology
Math-Computing Open Academy
[B21]
Acerca del Estilo en Programación
José Enrique González Cornejo
18 de abril 2009
DocIRS Technology
Math-Computing Open Academy
[B22]
Acerca de la Calidad de una Aplicación
José Enrique González Cornejo
18 de abril 2009
DocIRS Technology
Math-Computing Open Academy
[B23]
Fundamentos Teóricos de los
Lenguajes Estructurados
José Enrique González Cornejo
12 de julio de 2011
DocIRS Technology
Math-Computing Open Academy
[B24]
Propiedades Geométricas Cualitativas
José Enrique González Cornejo
15 de marzo 1997
DocIRS Technology
Math-Computing Open Academy
[B25]
Lunch & Learn: Quantum Computing
Andrea Morello
Quantum Engineering at University
of New South Wales
Australia
21 nov. 2018
[B26]
21 Lessons for the 21st Century
Talks at Google
Yuval Noah Harari
11 octubre 2018
[B27]
Homo-Deus-A-Brief-History-of-Tomorrow
Universidad de California,
Yuval Noah Harari
27 febrero 2017
[B28]
MIND BLOWN: Quantum Computing &
Financial Arbitrage
Andrea Morello
Quantum Engineering at University
of New South Wales
Australia
18 jun. 2020
[B29]
Algoritmo cuántico de Deutsch y Jozsa en GAMA
M. Paredes López - A. Meneses Viveros - G. Morales-Luna
Departamento de Matemáticas, Cinvestav, Av. Instituto
Politécnico Nacional 2508, CDMX
Departamento de Computación, Cinvestav,
Av. Instituto Politécnico Nacional 2508, CDMX
Rev. mex. fís. E vol.64 no.2 México jul./dic. 2018
[B30]
Principios Fundamentales de Computación Cuántica
2013, Vicente Moret Bonillo
Universidad de la Coruña-España
[B31]
Informática Cuántica - Parte 1
Tecnologias Disruptivas
Alejandro Alomar
9 jul. 2018
https://www.youtube.com/watch?v=SisRIgS3oO4
[B32]
Computación Cuántica para Torpes
Publicado el 26 de septiembre de 2016 por Sergio Montoro
[B33]
Intro to Quantum Computing
Steve Spicklemire
Lesson 38 Quantum Computing, Deutsch's Problem
[B34]
Learn Quantum Computation using Qiskit
Page created by The Jupyter Book Community
Qiskit Development Team Last updated on 2020/07/17.
[B35]
Disfruta de la Experiencia cuántica de IBM
Francisco R. Villatoro (Francis Naukas)
2 noviembre, 2018
https://francis.naukas.com/2018/11/02/
disfruta-de-la-experiencia-cuantica-de-ibm/
[B36]
Inversión de Matrices de Números Complejos
reshish.com 2011 - 2020
[B37]
Algoritmo de Deutsch
13 octubre 2016
Felipe Fanchini
https://www.youtube.com/watch?v=Sb5WRs8XUuU
[B38]
Desarrollo de un simulador para el protocolo
de criptografía cuántica E91
en un ambiente distribuido
Ingeniare. Rev. chil. ing. vol.23 no.2 Arica abr. 2015
Luis Cáceres Alvarez,
Roberto Fritis Palacios,
Patricio Collao Caiconte
[B39]
Effect of an artificial model’s vocal expressiveness
on affective and cognitive learning
.
Llaima Eliza González Brouwer
0999377
MSc. Human Technology Interaction
Department of Innovation Sciences
Eindhoven University of Technology
August 2018
[B40]
Así Cambiará el Mundo la Computación Cuántica
2016
Ignacio Cirac
https://www.youtube.com/watch?v=WJ3r6btgzBM
[B41]
GIPHY
Imagen de Animación Gif / Partículas
Explore Partículas Gif
[B42]
MathJax
MathJax es una biblioteca javascript
American Mathematical Society.
Accessible Math in All Browsers
[B43]
El Algoritmo de Deutsch-Jozsa
KET.G
25 mar. 2020
Twitter: https://twitter.com/KetPuntoG
[B44]
Apuntes de Grupos de Lie
Badajoz, 30 de diciembre de 2017
Volumen 3
1.2. Grupos de Lie
[B45]
Teoria de Grupos
Marshall Hall jr.
Biblioteca de Matemática Superior
1967 Maximilian Company, N.Y. USA
[B46]
Tutorial Grupos de Lie
Javier García
29 jun. 2017
Serie de Capítulos ~ España
[B47]
Matrices de Pauli - Pauli matrices Matrices de Pauli
Enciclopedia libre Matrices de Pauli
[B48]
La Mecánica Cuántica
Los grupos de rotación I
Matrices de Pauli
[B49]
Física Matemática
Grupos de Lie, rotaciones, unitarios, Poincaré.
Monte Carlo
L. L. Salcedo
Departamento de Física Atómica, Molecular y Nuclear
Universidad de Granada, E-18071 Granada, Spain
29 de julio de 2020
[B50]
Matrices de Pauli - Pauli matrices Matrices de Pauli
De Wikipedia, la enciclopedia libre Matrices de Pauli
[B51]
Phisics
Explore our Questions
[B52]
Entrevista a Jorge Antonio Vargas,
FAMAF
Universidad Nacional de Córdoba de Argentina,
Investigador del Conicet
20/01/2010, Pagina|12
,
[B53]
Introducción a Grupos y Álgebras de Lie de Dimensión Infinita,
Matthew Dawson,
CIMAT- Mérida México noviembre de 2020,
Instituto de Matemáticas de la UNAM
(Universidad Nacional Autónoma de México)
,
[B54]
Lie Groups:Introduction,
Richard E. BORCHERDS,
University of California,
Department of Mathematics, USA
,
[B55]
Lie theory for the Roboticist,
Joan Solà,
Institut de Robòtica i Informàtica Industrial, en catalán,
Consejo Superior de Investigaciones Científicas (CSIC),
Cataluña
Universidad Politécnica de Cataluña (UPC). España
[B56]
A micro Lie theory for state estimation in robotics,
Joan Solà, Jeremie Deray, Dinesh Atchuthan,
Diciembre 2021
arXiv ~ https://arxiv.org,
Web Accessibility Assistance -arXiv Operational Status
[B57]
Graph Theory,
Frank Harary,
1969
Addison-Wesley
USA
[B58]
RobotDocIRS,
José Enrique González Cornejo
abril 2003
DocIRS Technology
Math-Computing Open Academy
[B59]
Introducción a la Topología Algebraica,
Williams S. Massey,
1972
Editorial Reverté S.A.
España
[B60]
Lie Algebra Representations
André Henriques
Instituto de Matemáticas de la Universidad de Oxford
agosto del 2015.
[B61]
The Lie group $SL(2,C)$ and its Lie algebra $sl(2,C)$
Dr. Frederic Schuller
Friedrich-Alexander-Universität Erlangen-Nürnberg
21 sept 2015
[B62]
The Theory of Groups
Marshall Hall, JR.
The Macmillan Company 1967
New York. N.Y. USA.
English Publication.
Paginas Independientes del autor que Contienen los Capítulos del Documento:
Conceptos Matemáticos Básicos de
Computación Cuántica
José Enrique González Cornejo
20 de marzo 2020
DocIRS Technology
Math-Computing Open Academy
Algoritmo de Deutsch
José Enrique González Cornejo
20 de marzo 2020
DocIRS Technology
Math-Computing Open Academy
|
|