El Método de Publicaciones DocIRS —diseñado y desarrollado por el autor José Enrique González Cornejo— propone una forma innovadora y accesible de presentar artículos y videos científicos y matemáticos. A diferencia de las monografías académicas tradicionales en formato PDF, este enfoque apuesta por un formato interactivo, actualizable y libre, basado en el concepto de Hiperdocumento (Ver Hipertexto: Tratamiento Documental de Datos). Se aprovechan herramientas y servicios disponibles en Internet para construir un diálogo científico confiable, acumulativo y dinámico, cumpliendo además con los factores normativos de una publicación científica.
Características del Formato
Los artículos funcionan como hiperdocumentos interactivos, combinando texto, simuladores, animaciones y un menú flotante con índice central.
Se utiliza notación matemática avanzada mediante MathJax, permitiendo una visualización clara y profesional sin depender de imágenes estáticas.
Cada publicación incluye:
Notas contextuales emergentes al final de los párrafos.
Simulaciones y visualizaciones dinámicas.
Ficha técnica, mapa de publicaciones y videos complementarios.
Bibliografía y videografía enlazadas, con acceso directo a las fuentes.
En efecto, dentro del marco de información de entorno, cada artículo incorpora enlaces atingentes en la parte superior, que el lector puede consultar:
Tecnología y Plataforma
Las publicaciones están alojadas en servidores de AWS y desarrolladas sobre ASP clásico y componentes .NET, integrando JavaScript, servicios web y módulos dinámicos que permiten la visualización de notación matemática y resultados interactivos generados aleatoriamente.
Objetivo y Público
Esta propuesta está dirigida principalmente a jóvenes, docentes y entusiastas de las ciencias y la computación, y busca:
Fomentar una comprensión intuitiva de conceptos complejos.
Destacar la semántica particular de los algoritmos computacionales frente al lenguaje humano.
Promover una visión flexible y conceptual del desarrollo de algoritmos y del paralelismo computacional.
Inspirar el estudio de las matemáticas como herramienta esencial para la ciencia y la tecnología.
Todo el contenido es libre, gratuito y sin publicidad, con el fin de compartir conocimiento de manera accesible y significativa, como una contribución personal a la divulgación científica. Se busca ofrecer una mirada más cercana y conceptual que permita fortalecer la formación matemática y computacional.
La aplicación del Método de Publicaciones DocIRS abarca prácticamente toda la colección de artículos publicados desde los inicios de los años 2000. (Ver más adelante Mapa de Publicaciones y Artículos del Autor).
Tanto el Método de Publicaciones DocIRS como su soporte computacional están en constante evolución, gracias a los aportes de los usuarios y al avance continuo de la tecnología. Actualmente, ya se ha implementado la automatización del esquema del Método de Publicaciones DocIRS, permitiendo generar borradores a partir del contenido del autor mediante nuestro software propio. Además, se está desarrollando un proceso de integración de herramientas pertinentes de inteligencia artificial.
(Ver Mapa de Navegación ~ Hipertexto)
Producto cruzado
Álgebra de Lie
Corchetes de Lie
SO(3)
Espacio tridimensional
Transformación lineal
Grupo de Lie
Ortogonalidad
Bilinealidad
Antisimetría
Identidad de Jacobi
Vectores tridimensionales
Matriz de rotación
R³
Conmutador de matrices
Geometría diferencial
Simetría
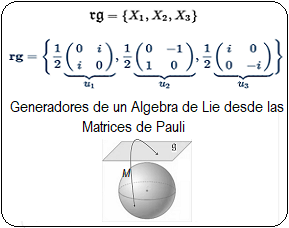
Generadores
Homomorfismo
Determinante
Operación binaria
Elemento identidad
Elementos inversos
Propiedad asociativa
Variedad diferenciable
Variedad topológica
Variedad suave
Multiplicación
Inverso
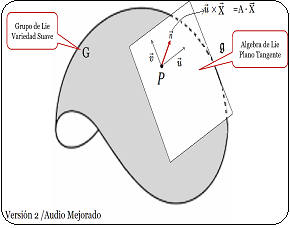
Vector Normal
Plano Tangente
Ejemplo Numérico
Resumen
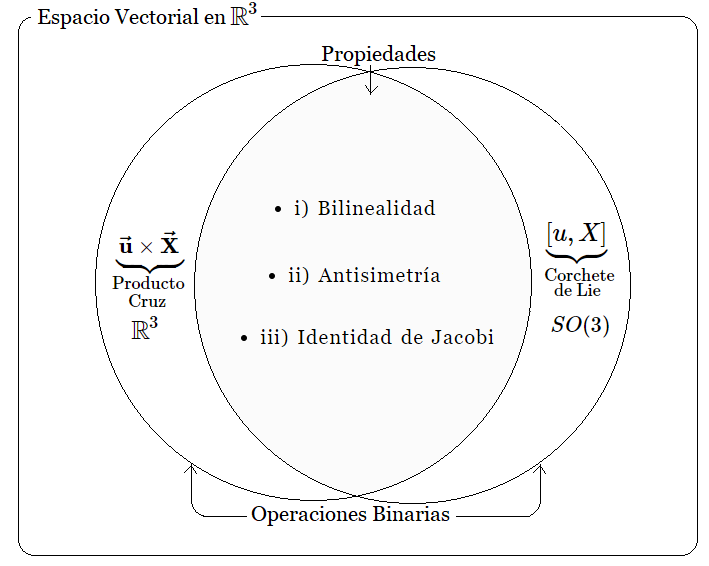
En este trabajo se aborda la relación de equivalencia que existe entre el producto cruz o vectorial con el Algebra de Lie.
El artículo detalla cómo el producto cruz o vectorial de dos vectores en un espacio tridimensional puede ser interpretado como un caso particular de un álgebra de Lie. Se explica que esta operación, conocida como corchetes de Lie, tiene propiedades similares al producto vectorial, incluyendo bilinealidad, antisimetría y la identidad de Jacobi.
A través de estas similitudes, se establece una conexión entre el producto cruzado y las estructuras algebraicas de las álgebras de Lie, especialmente en el contexto del grupo ortogonal especial $SO(3)$, que representa rotaciones tridimensionales y de donde se encuentra una matriz $A\in SO(3)$ que demuestra la analogía del producto cruz o vectorial con el Algebra de Lie.
La presentación se basa en conceptos tratados en referencias a una serie de publicaciones asociadas (Ver Mapa de Publicaciones)
1
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Estos grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento de rotación $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
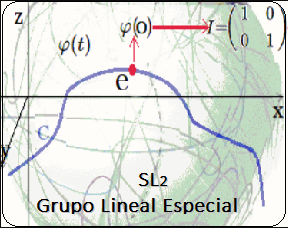
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
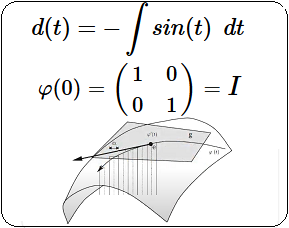
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. Aproximación Infinitesimal de las Rotaciones Pasivas).
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
En este artículo se mostrará que el producto cruz o vectorial de dos vectores, se puede considerar como un caso particular de un álgebra de Lie $\large{\mathfrak {g}}$
1 en el espacio tridimensional de los números reales.
Esta transformación entre las operaciones binarias,- producto cruzado y corchetes de Lie -, ocurre directamente en un espacio vectorial, dada las similitudes análogas que es posible establecer entre ambas operaciones. La similitud es importante, porque permite transferir conceptos y resultados de la Teoría de Lie
2 a la geometría y el cálculo vectorial, y viceversa.
$$\underbrace{[u, X]}_{\text{Corchete de Lie}}=\underbrace{u \times X}_{\text{Producto Cruz}}$$
A efecto de demostrar la correspondencia entre estas operaciones, se utilizarán los grupos especiales ortogonales $SO(3)$ (Special Orthogonal Group of Dimension 3), a través de una transformación lineal homeomorfa
3, de modo de describir cómo el producto cruzado se convierte al espacio tridimensional en un álgebra de Lie asociada, donde los vectores actúan como generadores cuando esta operación vectorial satisface las propiedades de Lie. (Bilinealidad, Antisimetría e Identidad de Jacobi).
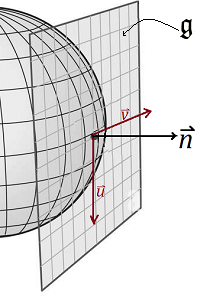
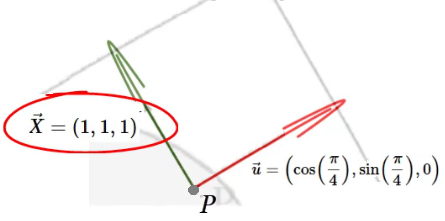
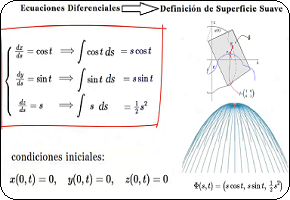
Los vectores $\vec{u}$ y $\vec{v}$, forman una base del plano tangente en el punto $P$ de la superficie, donde su producto cruzado genera un vector ortogonal (normal a la superficie), por tanto son parte de los generadores del álgebra de Lie del plano tangente $P$.
En otros términos, se mostrará que la operación vectorial producto cruz y la operación binaria corchetes de Lie son análogas porque ambas describen la forma en que dos elementos interactúan entre sí en un espacio euclídeo $\mathbb R^3$.
Particularmente, en el presente desarrollo porque $SO(3)$
11
es un Grupo de Lie
4 que representa las rotaciones tridimensionales, donde cada uno de sus elementos es una matriz de rotación de $3×3$ que es ortogonal (su transpuesta es igual a su inversa) y tiene un determinante igual a $1$
La operación binaria producto cruz o vectorial entre dos vectores tridimensionales tiene una relación directa con el concepto de conmutador de dos matrices, que opera con los corchetes de Lie en álgebra de Lie.
Por una parte, muestra la orientación y el área de un paralelogramo formado por dos vectores
5 y por otra parte conduce hacia un enfoque geométrico cualitativo o topológico para las álgebras de Lie.
Producto Cruz ~ Corchetes de Lie6
Operaciones Vectoriales
En el contexto del plano tangente, si consideramos que $\vec{u}$ y $\vec{v}$ pertenecen a un conjunto de generadores de una representación del álgebra de Lie
7, entonces el producto vectorial $\vec{u} \times \vec{v}$ puede interpretarse como el corchete de Lie de dos generadores de la simetría.
Es decir, se identifica un álgebra de Lie $\mathfrak {g} \equiv \mathfrak {so(3)}$ con el espacio vectorial equipado con el producto cruzado, mediante una transformación lineal $\varphi: \mathbb R^3 \to \mathfrak {g}$, que constituye un homomorfismo de álgebras de Lie. Esto significa que satisface la relación: $\varphi([u, v]) = [\varphi(u), \varphi(v)]$, donde $[u, v] = u \times v $ es el producto cruzado y $[\varphi(u), \varphi(v)]$ es el corchete de Lie en $\mathfrak {\large{g}}$.
De hecho, esta operación preserva la estructura del álgebra, donde el vector resultante $\large{\vec n}$ corresponde a otro generador en el álgebra de Lie asociada.
En efecto, el producto cruz de dos vectores $\vec{u}$ y $\vec{v}$ en $\mathbb{R}^3$ es otro vector $\vec{n} = \vec{u} \times \vec{v}$, que es perpendicular tanto a $\vec{u}$ como a $\vec{v}$. Una de las formas de definición por la determinante de la siguiente matriz. (Ver Cálculo Curvatura de Gauss):
$$
\vec{u} = \begin{pmatrix} u_1 \\ u_2 \\ u_3 \end{pmatrix}, \quad \vec{v} = \begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix}
$$
Calculando la determinante $[V_1]$ por expansión de menores, se tiene que el producto cruzado de estos dos vectores es:
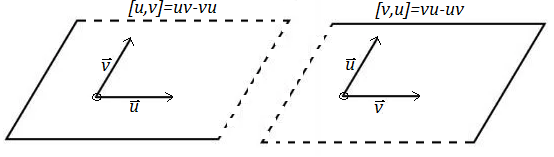
En los artículos de base acerca de la definición del Algebra de Lie (ver Mapa) se estableció que los corchetes de Lie son una operación $[X, Y]=XY-YX$, que toma dos elementos matriciales $X$ y $Y$ del álgebra y produce otro elemento en el álgebra. En el caso de los vectores en $\mathbb{R}^3$, el producto cruzado también cumple con las propiedades de ser bilineal, antisimétrico y satisfacer la identidad de Jacobi.
Esto se deduce directamente de la definición del producto vectorial y de su interpretación geométrica, ya que el área y la orientación de un paralelogramo cambian de signo al intercambiar $\vec{u}$ y $\vec{v}$.
El producto cruzado es antisimétrico
iii) Identidad de Jacobi:
El producto cruzado satisface la identidad de Jacobi si para cualesquiera vectores $\vec{u}, \vec{v}, \vec{w}$ se cumple:
Esta identidad asegura que la suma cíclica de estos productos es siempre el vector cero, lo cual puede demostrarse expandiendo cada uno de los productos utilizando la propiedad distributiva y aplicando la antisimetría del producto cruzado. Es decir, sin la condición de esta identidad, la operación de Lie no podría cumplir con las propiedades necesarias para las aplicaciones en geometría, física, y otras áreas de las matemáticas.
El producto cruzado satisface la identidad de Jacobi
Estas tres propiedades muestran que el producto cruzado no solo es una operación importante en geometría, sino también que está estrechamente relacionado con las estructuras algebraicas más profundas, como las álgebras de Lie.
En este contexto, el producto cruzado $\vec{u} \times \vec{v}$ puede verse como un caso particular de los corchetes de Lie, donde el álgebra de Lie es el espacio tridimensional $\mathbb{R}^3$ con la operación binaria definida precisamente por el producto cruzado.
Luego, el producto cruzado se puede expresar como la multiplicación de una matriz asociada a $\vec {u}$ por el vector $\vec{X}$. Esta estructura convierte al espacio tridimensional en un álgebra de Lie asociada, donde los vectores actúan como generadores y el producto cruzado define la operación algebraica que satisface las propiedades de Lie.
Corchetes de Lie ~ $\vec{u} \times \vec{X}\longrightarrow SO(3)$
Por cierto, la operación Corchetes de Lie cumple con las tres propiedades comunes,
Para demostrar que el producto cruz de dos vectores en el espacio tridimensional es análogo a la operación corchetes de Lie, considérese la operación vectorial unitaria $\vec{u}$ y $\vec{v}$ rotulada como $[V_1]$, pero dejando fijo el vector $\vec {u}$ y cambiando el vector $\vec {v}$ por un vector variable $\vec {X}$.
Por tanto, aplicando la definición rotulada con $[V_2]$ para el producto cruz $\vec{u} \times \vec{X}$ se tiene que, existe una matriz $A\in SO(3)$, tal que:
Donde $\vec{u} = \begin{pmatrix} u_1 \\ u_2 \\ u_3 \end{pmatrix}$ y $\vec{X} = \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}$, se toma
el producto cruz de los dos vectores $\vec{u}$ y $\vec{X}$ en $\mathbb{R}^3$ descrito en $[V_3]$
Desde esa resultante $[V_3]$, se buscará una matriz de $A_{3 \times 3}$ en $SO(3)$, i.e., ortogonal y con determinante es igual a $1$, de modo que mediante una transformación lineal con la multiplicación ordinaria de matrices nos traslade desde $\vec{u} \times \vec{X}\longrightarrow SO(3) $
En otros términos, se buscará una matriz de $A_{3 \times 3}$ en $SO(3)$ para resolver el sistema de ecuaciones. Es decir, encontrar una matriz de $A \in \mathbb {R}^3 $ que sea ortogonal, con determinante igual a $1$ (porque sus vectores son unitarios) y que al multiplicar esa matriz por el vector $\vec{X}$ sea igual a la ecuación rotulada como $\mathbf {[V_3]}$
Previo a la demostración de cumplimiento de las tres propiedades análogas, por parte de la expresión $ A·X$ , se reitera la definición de matrices de rotación en $SO(3)$:
$$
SO(3)=\unicode{123} M \in \mathbb {R}^3 \text{ | } \underbrace{det(M)=1}_{Especiales} \quad\land\quad \underbrace{M^T=M^{-1}}_{Ortogonalidad}\unicode{125}
$$
Definición que nos señala que $SO(3)$ es el conjunto de todas las matrices $M$ de ${3\times 3}$ en $\mathbb {R}^3$ que son ortogonales y cuya determinante es $1$
9.
$\exists A \in SO(3)$ \ $A·X = \vec{u}\times \vec{X}$
Luego, se tomará una matriz $A \in SO(3)$ asociada a $\vec{u}$ y que es solución de la siguiente ecuación rotulada como $\mathbf {[V_4]}$, que tiene la forma:
$$
\bbox[12px,border:1px solid #c0c0c0]
{
\vec{u} \times \vec{X} \overset{\varphi()}{{\longrightarrow}}\underbrace{\begin{pmatrix} 0 & -u_3 & u_2 \\ u_3 & 0 & u_1\\ - u_2 & u_1 & 0 \end{pmatrix}}_{\large{A_{3\times 3}}}\vec{X}
\qquad [V_4]
}
$$
$$
A = \begin{pmatrix}
0 & -u_3 & u_2 \\
u_3 & 0 & -u_1 \\
-u_2 & u_1 & 0
\end{pmatrix}
$$
A continuación, se probará primero que la operación la matriz $A \cdot \vec{X}$ es bilineal y que $A\in SO(3)$ implica que $A$ es antisimétrica, ortogonal, tiene determinante igual a $1$ y por lo tanto es solución de sistema de ecuaciones $\mathbf {[V_4]}$:
La operación $A \cdot \vec{X}$ es bilineal:
En efecto, la operación es lineal en cada uno de sus argumentos:
i) Linealidad en el vector $\vec{X}$:
$$ A \cdot (\vec{X} + \vec{Y}) = A \cdot \vec{X} + A \cdot \vec{Y} \quad \text{y} \quad A \cdot (c\vec{X}) = c(A \cdot \vec{X})$$
Donde $\vec{X}, \vec{Y} \in \mathbb{R}^3$ y $c \in \mathbb{R}$
ii) Linealidad en la matriz $A$:
$$ (A + B) \cdot \vec{X} = A \cdot \vec{X} + B \cdot \vec{X} \quad \text{y} \quad (cA) \cdot \vec{X} = c(A \cdot \vec{X})$$
Donde $A$ y $B$ son matrices de la forma de $A$ y $c \in \mathbb{R}$
Esto confirma la linealidad respecto al vector $\vec{X}$.
La linealidad en la matriz $A$ se sigue de la propiedad distributiva de la multiplicación matricial. Si se tienen dos matrices $A$ y $B$ de la misma forma y un escalar $c \in \mathbb{R}$, entonces:
Esto se demuestra simplemente al aplicar la suma de matrices seguida de la multiplicación de la matriz resultante con el vector $\vec{X}$:
$$
(A + B) \cdot \vec{X} = A \cdot \vec{X} + B \cdot \vec{X}
$$
Esto se demuestra aplicando la multiplicación por un escalar a la matriz $A$ antes de multiplicarla por el vector $\vec{X}$:
$$
(cA) \cdot \vec{X} = c(A \cdot \vec{X})
$$
La operación de multiplicación de la matriz $A$ por el vector $\vec{X}$ es bilineal.
La matriz $A$ es antisimétrica:
$A^T = -A$, i.e. la transpuesta de la matriz es igual a la matriz original con signos opuestos.
Esta matriz es diagonal con $u_1^2 + u_2^2 + u_3^2 = 1$ (si consideramos que $\vec{u}$ es un vector unitario), lo que confirma que $A^T A = I$
10.
La matriz $A$ es ortogonal
La matriz $\mathbf {det(A)=1}$
La determinante de una matriz antisimétrica de tamaño impar es siempre $0$, pero $A$ no es una matriz ortogonal típica sino una matriz de rotación que pertenece a $SO(3)$.
Ciertamente la matriz $A$ bajo la suposición de que $ A \in SO(3) $, es por definición es especial ($ det(A)=1 $), ortonormal($ A^T A = I $) y antisimétrica ($ A^T = -A $). Luego:
Es decir la determinante de $A$ depende de la forma de los elementos $ u_i $. Donde, para que la matriz $ A $ pertenezca a $SO(3)$, debe cumplir con $ \det(A) = 1 $, particularmente porque:
Si $ \vec{u} = (u_1, u_2, u_3) $ es un vector unitario, la matriz $ A $ que se obtiene es una matriz de rotación alrededor de $\vec{u}$ con un ángulo $\large{\frac{\pi}{2}}$ radianes.
La matriz $ A $ representa una rotación de $\large{\frac{\pi}{2}}$ radianes alrededor del eje definido por $\vec{u}$, por lo que su determinante será $ \cos^2(\theta) + \sin^2(\theta) = 1 $.
Este resultado es consistente con la pertenencia de $ A $ al grupo $SO(3)$ y se demuestra que la matriz $A$ tiene determinante igual $1$.
Donde $A$ pertenece al álgebra de Lie $\large{\mathfrak {g}\equiv \mathfrak {so(3)}}$ y al multiplicarse por un vector $\vec{X}$ en $\mathbb {R}^3$, produce el producto cruzado $\vec{u} \times \vec{X}$. Esto demuestra que el producto cruzado de dos vectores en $\mathbb {R}^3$ es análogo a los corchetes de Lie en el contexto del álgebra de Lie $\large{\mathfrak {g}\equiv \mathfrak {so(3)}}$.
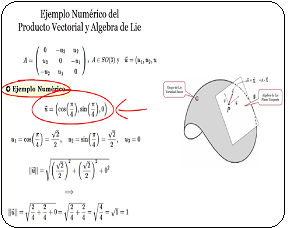
Ejemplo Numérico
En este ejemplo se le asigna valores numéricos a la siguiente expresión vista previamente (Ver $\mathbf {[V_4]}$):
Entonces, para ilustrar la matriz antisimétrica asociada a un vector unitario $\vec{u} = (u_1, u_2, u_3)$ que genera la equivalencia del producto cruzado con los corchetes de Lie en $\mathbb{R}^3$, se utilizará un ejemplo numérico con valores trigonométricos para el vector $\vec{u}$.
Este es el mismo resultado, - visto en la ecuación $\mathbf {[V_3]}$-, obtenido al multiplicar la matriz $A$ por el vector $\vec{X}$.
Es decir, este ejemplo numérico muestra que la matriz $A$ genera el mismo resultado que el producto cruzado $\vec{u} \times \vec{X}$.
Síntesis
En síntesis se detalló cómo el producto cruz o vectorial de dos vectores en un espacio tridimensional puede ser interpretado como un caso particular de un álgebra de Lie.
Se explicó que la operación binaria corchetes de Lie, tiene propiedades similares al producto vectorial, incluyendo bilinealidad, antisimetría y la identidad de Jacobi.
A través de estas similitudes, se establece una conexión entre el producto cruzado y las estructuras algebraicas de las álgebras de Lie, especialmente en el contexto del grupo ortogonal especial $SO(3)$, que representa rotaciones tridimensionales
12.
En efecto, se demostró que la matriz $A$, - solución de la ecuación $\vec{u}\times \vec{X}=A·\vec{X}$ -, es una matriz antisimétrica asociada al vector $\vec{u} = (u_1, u_2, u_3)$ en $\mathbb{R}^3$ y que mediante esta matriz se establece la conexión entre el producto vectorial y el grupo especial ortogonal $SO(3)$. Grupo que describe las rotaciones en tres dimensiones, lo que permite representar el producto cruzado como una operación lineal utilizando matrices.
Se ha visto que el grupo $SO(3)$ es el grupo de matrices ortogonales $3 \times 3$ con determinante $1$, que describen rotaciones en $\mathbb{R}^3$.
Donde cada matriz antisimétrica de este tipo genera una rotación infinitesimal en $\mathbb{R}^3$. Esta rotación también puede obtenerse mediante la exponencial de matrices, con un ángulo de rotación $\theta$:
En resumen, la matriz $A$ ha permitido representar el producto vectorial como una operación lineal que está directamente relacionada con el grupo $SO(3)$, mostrando que este tipo de matrices antisimétricas forman la base del álgebra de Lie $\mathfrak{g}\equiv\mathfrak{so}(3)$, describiendo las rotaciones en $\mathbb{R}^3$.






 Video Síntesis Artículo
Video Síntesis Artículo