|
Los grupos en $SO(3)$ consisten en rotaciones en tres dimensiones, que en este caso se configuraron a partir de la matriz $R_{2 \times 2} \in SO(2)$ aumentada con los vectores canónicos.
$$
\begin{pmatrix} x \\ y \\ z \end{pmatrix} \mapsto
x \mathbf{\vec i} +
y \mathbf{\vec j} +
z \mathbf{\vec k}
$$
Ciertamente la matriz real $R_{2\times 2}$, - sobre un ángulo de rotación $\theta$ -, en torno a un origen o centro de rotación en el plano cartesiano, constituye un generador del Grupo de Lie, i.e. un grupo especial ortogonal de dimensión 2:
$$R_{2 \times 2}(\theta)=\begin{pmatrix}
cos(\theta) & -sin(\theta) \\
sin(\theta) & cos(\theta) \\
\end{pmatrix}
$$
A partir de esta matriz de base $R_{2 \times 2}(\theta)$, se construyen las tres matrices generadoras en $SO(3)$, que hemos denotado como $G$, que son:
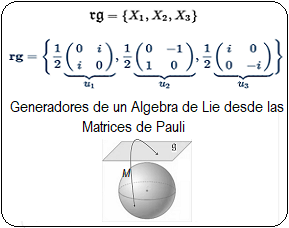
$$G=\unicode{123} R_{x}(\alpha), R_{y}(\beta), R_{z}(\gamma) \unicode{125}$$
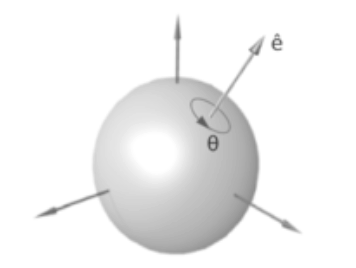
Para la formalización de la rotación de las tres matrices de $G$ en el espacio $\mathbb R^3$, basta sólo con la posición de los vectores unitarios, dado que todo vector es múltiplo de alguno de ellos. Con estos vectores, - y sus operadores matriciales-, se conforma la esfera unitaria.
$$
S^2=\unicode{123}(x,y,z)\in \mathbb R^3 \text{ / } x^2 + y^2 + z^2=1\unicode{125}
$$
Permutando cíclicamente los ejes $\vec x, \vec y, \vec z$, obtenemos las representaciones matriciales correspondientes a rotaciones
respecto a los ejes.
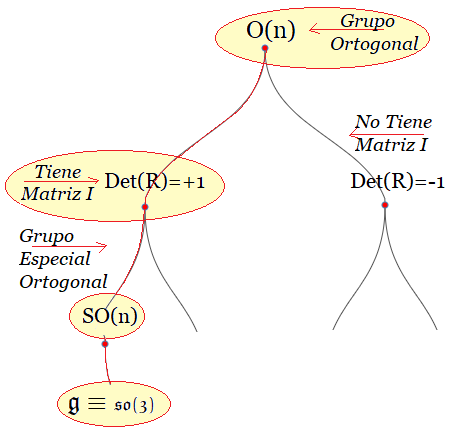
Luego, las matrices de rotación del espacio $\mathbb R^3$ son matrices $3\times 3$, ortogonales y de determinante $1$, i.e. este conjunto tiene estructura de grupo $SO(3)$. En conclusión, el giro es en $SO(2)$ y la acción de rotar la efectúan los elementos del grupo $SO(3)$
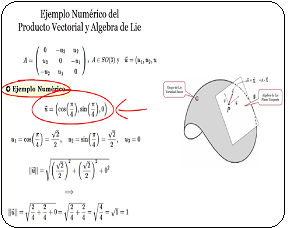
Ilustremos la extensión mediante un operador $R_{3 \times 3}(\beta)$ en el plano euclidiano que al ser aplicado a un vector aumentado de coordenadas rectangulares $(x_1,x_2,1)$, - localizado en torno a un punto de origen $0$ -, lo hace rotar en un ángulo $\beta$ hacia un vector $X'$ de coordenadas $(x_1',x_2',1)$.
En otros términos, se aplica el mismo procedimiento previo de SO(2), i.e. una matriz aumentada $R_{3 \times 3}$ que multiplicada por el vector $X$ obtenga estas nuevas coordenadas en $X'$, i.e. de esta forma obtendremos un sistema de coordenadas sobre la variedad SO(3):
$$
X'=\begin{pmatrix} x_{11}'\\ x_{21}' \\ 1 \\ \end{pmatrix}=\begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \\ \end{pmatrix} \begin{pmatrix} x_{11}\\ x_{21} \\ 1 \\ \end{pmatrix}
$$
Este conjunto de matrices cumple las condiciones de rotación en el plano euclidiano y constituye un Grupo de Lie en $SO(3)$.
Rotaciones Independientes en Torno a Ejes 82
Estas tres matrices de rotación
$G=\unicode{123}R_{x}(\alpha), R_{y}(\beta), R_{z}(\gamma)\unicode{125}$
, que se señalan a continuación en $\mathbb R^3$:
- $R_{x}(\alpha)$ rota el plano yz alrededor del origen por un ángulo $\alpha$.
- $R_{y}(\beta)$ rota el plano xz alrededor del origen por un ángulo $\beta$.
- $R_{z}(\gamma)$ rota el plano xy alrededor del origen por un ángulo $\gamma$.
La transpuesta $R^T$ de cada una de estas matrices y multiplicarlas por sus transpuestas respectivas, sus productos serán iguales en a la matriz identidad $I$:
- $R_{x}(\alpha)(R_{x}(\alpha))^T=(R_{x}(\alpha))^T R_{x}(\alpha)=I$.
- $R_{y}(\beta)(R_{y}(\beta))^T=(R_{y}(\beta))^T R_{y}(\beta)=I$.
- $R_{z}(\gamma)(R_{z}(\gamma))^T=(R_{z}(\gamma))^T R_{z}(\gamma)=I$
Matrices Aumentadas ~ $G \in SO(3)$
Es decir, el grupo completo $G \in SO(3)$ consiste en el producto de estas matrices, las cuales al multiplicarlas por sus transpuestas son iguales a la matriz identidad $I$. Por tanto, cumplen con la condición de ortogonalidad en lo reales:
$$R_{x}(\alpha)=
\begin{pmatrix}
\bbox[yellow]{1} & \bbox[yellow]{0} & \bbox[yellow]{0}\\
\bbox[yellow]{0} & cos(\alpha) & sin(\alpha) \\
\bbox[yellow]{0} & -sin(\alpha) & cos(\alpha)\\
\end{pmatrix}
$$
$$R_{y}(\beta)=
\begin{pmatrix}
cos(\beta) & \bbox[yellow]{0} & -sin(\beta) \\
\bbox[yellow]{0} & \bbox[yellow]{1} & \bbox[yellow]{0}\\
sin(\beta) & \bbox[yellow]{0} & cos(\beta)\\
\end{pmatrix}
$$
$$R_{z}(\gamma)=
\begin{pmatrix}
cos(\gamma) & sin(\gamma) & 0 \\
-sin(\gamma) & cos(\gamma) & 0 \\
\bbox[yellow]{0} & \bbox[yellow]{0} & \bbox[yellow]{1}\\
\end{pmatrix}
$$
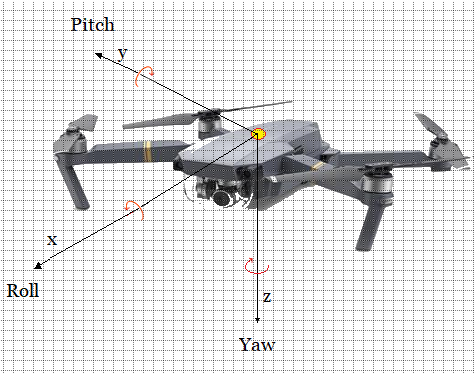
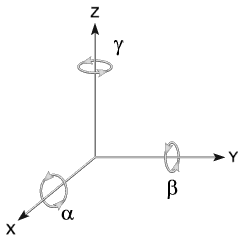
Las rotaciones se realizan sobre los ejes de coordenadas cartesianas en el espacio tridimensional euclidiano, se identifican los ángulos de rotación en torno a cada eje, tomando como referencia el giro en torno al eje $z$ como $\gamma$, el giro en torno al eje $y$ como $\beta$, y el giro en torno al eje $x$ como $\alpha$.
Cada una de las tres matrices $R_x(\alpha), R_y(\beta) \text{ y } R_z(\gamma)$ son matrices ortogonales, i.e. dejan invariante la longitud del vector en rotación. Esto se realiza porque se requieren,- en cada plano -, sólo rotaciones en torno a dos de los ejes coordenadas rectangulares, prescindiendo del otro eje.
Nótese que la matriz $R_{2 \times 2}\in SO(2)$ se aumenta introduciendo los vectores canónicos: en el caso $R_{x}(\alpha)$, se introdujo $\vec i$ en la primera fila y primera columna; en $R_{y}(\beta)$ se introdujo $\vec j$ en la segunda fila y segunda columna; y en $R_{z}(\gamma)$ se introdujo $\vec k$ en la tercera fila y tercera columna.
Estas tres rotaciones son independientes las unas de las otras.
Luego, al diferenciar cada una de estas tres matrices y evaluarlas en $\theta=0$, se obtienen los generadores infinitesimales de rotación, en torno a cada uno de los ejes respectivamente $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$ en $SO(3)$. i.e las siguientes derivadas: $\frac{dR_x}{d\alpha}, \frac{dR_y}{d\beta}, \frac{dR_x}{d\gamma}$. (Sabiendo que $sin'(\theta)=cos(\theta),\quad cos'(\theta)=-sin(\theta) \quad \land \quad sin(0)=0,\quad cos(0)=1$)
Entonces, $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$ es un generador unitario del Algebra de Lie en tres dimensiones, el cual se obtiene de las derivadas de cada una de estas tres matrices $R_{x}(\alpha), R_{y}(\beta), R_{z}(\gamma)$.
En efecto,
$$\frac{dG}{d\theta} \mid_{\theta=0}$$
$$(R_{x}(0))'=\begin{pmatrix}
0 & 0 & 0\\
0 & \underbrace{-sin(0)}_{\color{red} 0} & \underbrace{-cos(0)}_{\color{red} {-1}} \\
0 & \underbrace{cos(0)}_{\color{red} 1} & \underbrace{sin(0)}_{\color{red} 0}\\
\end{pmatrix}=\begin{pmatrix}
0 & 0 & 0 \\
0 & 0 & -1 \\
0 & 1 & 0 \\
\end{pmatrix}=X_{1}
$$
|
$$(R_{y}(0))'=\begin{pmatrix}
\underbrace{-sin(0)}_{\color{red} 0} & 0 &\underbrace{-cos(0)}_{\color{red} {-1}} \\
0 & 0 & 0\\
\underbrace{cos(0)}_{\color{red} 1} & 0 & \underbrace{-sin(0)}_{\color{red} 0}\\
\end{pmatrix}=\begin{pmatrix}
0 & 0 & -1 \\
0 & 0 & 0\\
1 & 0 & 0\\
\end{pmatrix}=X_{2}
$$
|
$$(R_{z}(0))'=\begin{pmatrix}
\underbrace{-sin(0)}_{\color{red} 0} & \underbrace{cos(0)}_{\color{red} 1} & 0 \\
\underbrace{-cos(0)}_{\color{red} {-1}} & \underbrace{sin(0)}_{\color{red} 0} & 0 \\
0 & 0 & 0\\
\end{pmatrix}=
\begin{pmatrix}
0 & 1 & 0 \\
-1 & 0 & 0 \\
0 & 0 & 0\\
\end{pmatrix}=X_{3}
$$
|
Fin de la Deducción de $\vec P$
De esa forma se demuestra cómo se deducen los generadores unitarios del Algebra de Lie $\large{\mathfrak {g}}$ en tres dimensiones $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$, el cual se mapea como $SO(2)\mapsto SO(3)$, i.e. aumentandando la matriz $R_{2\times 2}$ con los vectores canónicos y obteniendo tres matrices $R_{3\times 3}$ de rotación, en torno a cada eje. Posteriormente, se deriva cada una de las matrices de rotación $G=\unicode{123} R_{x}(\alpha), R_{y}(\beta), R_{z}(\gamma) \unicode{125}$, cada una de estas derivadas se evalúa en $0$, y de ahí se obtiene $\vec P$.
|


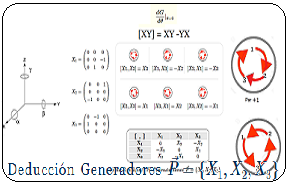
 Deducción Generadores $\vec P=\unicode{123}X_1,X_2,X_3\unicode{125}$
Deducción Generadores $\vec P=\unicode{123}X_1,X_2,X_3\unicode{125}$