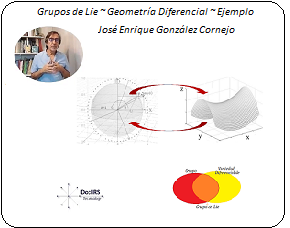
Grupos de Lie
Geometría diferencial
Variedades diferenciables
Parches locales
Atlas
Transformaciones analíticas
Espacio euclidiano
Semicírculo superior
Semicírculo inferior
Circunferencia
Cartas locales
Funciones suaves
Matemáticas aplicadas
Cálculo diferencial
Transición entre cartas
Algebra de Lie
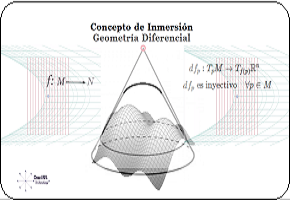
Superficie curva
Mapeo a espacio euclidiano
Representación geométrica
Resumen
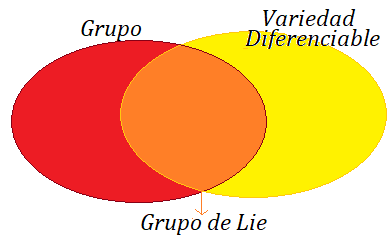
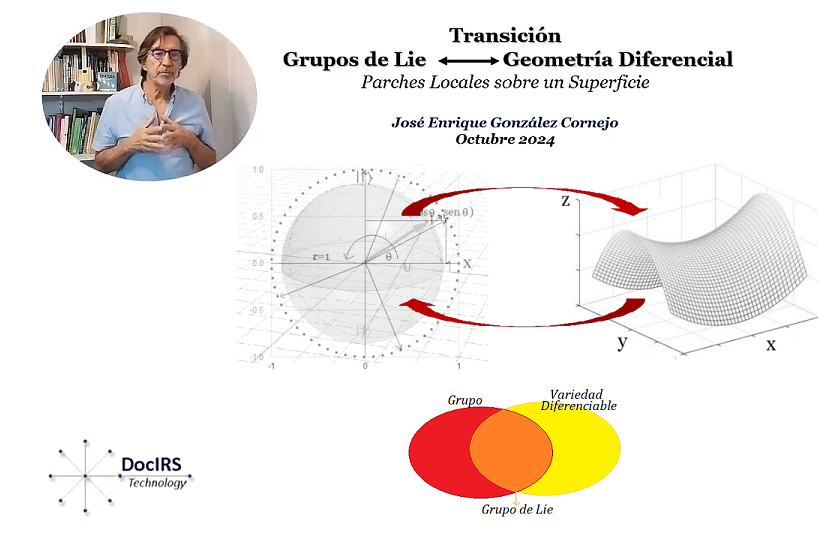
El texto explica la relación entre los grupos de Lie y la geometría diferencial, destacando su aplicación en diversas áreas como la física, inteligencia artificial y el aprendizaje automático. Los grupos de Lie combinan la estructura algebraica de un grupo con la continuidad de una variedad diferenciable, lo que permite usar cálculo diferencial para analizar estos espacios.
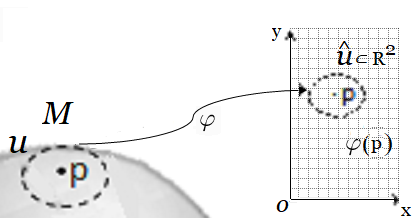
Se menciona cómo las variedades diferenciables pueden ser representadas mediante "parches" locales, que son mapeos de regiones de la superficie a un espacio euclidiano. Estos parches se unen para formar una estructura suave y continua llamada atlas.
En resumen, la cartas locales describen pequeñas porciones de la variedad en $ \mathbb{R}^n $ de manera suave, estas cartas locales se ensamblan mediante funciones de cambio de coordenadas aseguran transiciones suaves entre ellas.
De modo que un atlas es el conjunto de cartas locales que cubren toda la variedad diferenciable global, - que es suave y coherente -, la cual se configuró al coser todas las cartas locales mediante esas funciones de cambio de coordenadas.
Este enfoque es fundamental en geometría diferencial, ya que permite estudiar objetos complejos como superficies, curvas y más en un marco matemático sólido.
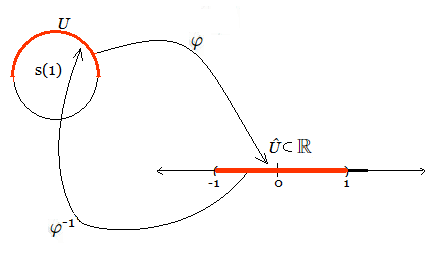
Un ejemplo sencillo es la circunferencia, que localmente se comporta como un espacio euclidiano, pero globalmente requiere dos funciones (para los semicírculos superior e inferior) que, al unirse, cubren toda la circunferencia. Este proceso es descrito a través de cartas locales que cubren el semicírculo superior $ \varphi_1 $ y el semicírculo inferior $ \varphi_2 $, ambas diferenciables en su dominio. Las funciones de transición entre estas cartas son suaves, lo que garantiza que la circunferencia sea una variedad diferenciable completa.
Abstract
The text explains the relationship between Lie groups and differential geometry, highlighting their application in various fields such as physics, artificial intelligence, and machine learning. Lie groups combine the algebraic structure of a group with the continuity of a differentiable manifold, which allows the use of differential calculus to analyze these spaces.
It mentions how differentiable manifolds can be represented using local "patches," which are mappings of surface regions to a Euclidean space. These patches are joined together to form a smooth and continuous structure called an atlas.
A simple example is the circle, which behaves locally like a Euclidean space but globally requires two functions (for the upper and lower semicircles) that, when combined, cover the entire circle. This process is described through local charts that cover the upper semicircle $ \varphi_1 $ and the lower semicircle $ \varphi_2 $, both differentiable in their domains. The transition functions between these charts are smooth, ensuring that the circle forms a complete differentiable manifold.
1
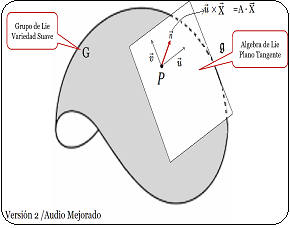
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
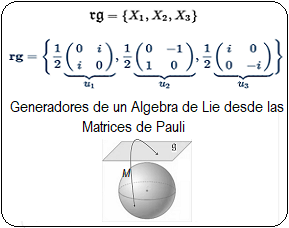
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Estos grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
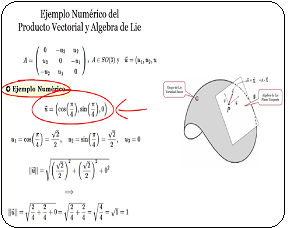
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento de rotación $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
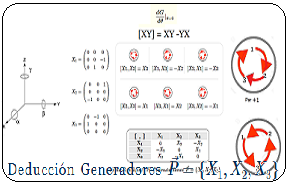
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
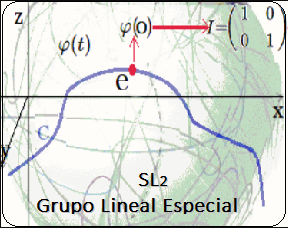
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. Aproximación Infinitesimal de las Rotaciones Pasivas).
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
Los grupos de Lie son una herramienta utilizada en todas las matemáticas aplicadas. Especialmente en las disciplinas modernas actuales asociadas a la física, Data Science,
Inteligencia Artificial (IA), aprendizaje automático2 y directamente en Geometría Diferencial.
Los grupos de Lie se definen como objetos matemáticos que poseen simultáneamente dos estructuras.
La primera estructura es la de un grupo, - i.e. son un conjunto con una operación binaria asociada-, cuyos elementos son transformaciones que satisfacen las condiciones de ser un grupo.
La segunda estructura tiene asociado el concepto de continuidad que es intrísico a una variedad diferenciable, i.e. estos objetos geométricos
pueden ser tratados mediante el Cálculo Diferencial e Integral. En otras palabras, deben ser espacios donde la diferenciación e integración sea aplicable.
Espacio Geométrico
Por esa razón, se dice que una variedad diferenciable es un espacio geométrico que se explica localmente como un espacio euclídeo, pero con una estructura global más compleja.
Esto significa que se establece un conjunto de transformaciones analíticas y diferenciables que se pueden intuir y construir mediante conjuntos de parches locales que se van pegando y que constituyen una variedad en forma global.
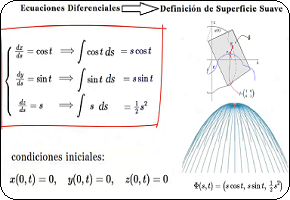
De ese modo, se conforma una representación analítica de una
superficie, donde estas disminutas transformaciones se satisfacen las condiciones de ser un grupo.
Variedad Topológica de dimensión n6
Estos parches locales que son regiones en general infinitesimales de la superficie. los cuales pueden ser mapeados a un espacio euclídeo, donde cada parche local
es una función que asigna coordenadas a cada punto de la región.
Cuando se extienden estas funciones, entonces pueden ser un grupo, pero no siempre son una variedad diferenciable.
Variedad Topológica ~ ∀ p ∈ M ∃ (U,φ)7
Al extender los parches locales y unirlos, se forma una superficie suave y continua, que se denomina atlas.
Esta unión se construye de tal manera que las coordenadas de los parches locales se correspondan entre sí. (Ver Algebra de Lie $M_n(K)$ - Aplicaciones ~ Formalización)
Ejemplo Circunferencia
El ejemplo más simple es el circunferencia, que es una superficie curva que localmente se comporta como el espacio euclidiano,
dado que se deben ensamblar dos funciones para configurar el objeto.
Para describir la circunferencia como una variedad diferenciable, se puede cubrir con cartas que la mapean a subconjuntos de ese espacio.
En efecto, se sabe que si se escribe la ecuación de la circunferencia en coordenadas cartesianas se requieren de dos funciones. Puesto que la circunferencia es una curva cerrada, un solo conjunto de coordenadas no es suficiente para cubrir toda la circunferencia sin problemas para lograr la variedad diferenciable 3.
Cartas Cubren la Variedad $\longrightarrow$ Atlas8
Para ello, se usan dos cartas que cubren el círculo, una carta para el semicírculo superior y otra para el semicírculo inferior.
Luego, considérese una circuferencia centrada en el origen $O=(0,0)$ en $\mathbb{R}^2$ de radio $ \mathbb{r}=1$, dada por la ecuación:
Aquí, $\varphi_1 $ es una función que toma un valor $ x $ en el intervalo abierto $ (-1, 1) $ y lo mapea a un punto en el semicírculo superior en $ \mathbb{R}^2 $.
La función es suave (diferenciable) en este dominio, excepto en los extremos, pero cubre completamente el semicírculo superior.
Ahora, la carta para el semicírculo inferior $y_2$, de manera similar, es la parte de la circunferencia donde $ y \leq 0 $.
Nuevamente, se usa $ x $ como parámetro y $ y_1 $ se expresa en de valor negativo de la raíz cuadrada:
Para cubrir toda la circunferencia, se unen las dos cartas locales. El conjunto de cartas $ \{ \varphi_1, \varphi_2 \} $ forma lo que se llama un atlas, que cubre
toda la variedad diferenciable . En este caso, las dos cartas se superponen en la región donde $ x \in (-1, 1) $ y $ y \neq 0 $, es decir, en la parte de la circunferencia
donde ambas coordenadas son válidas (excepto en los puntos $ (-1, 0) $ y $ (1, 0) $).
Cartas Transición Suave
La transición entre las cartas se describe en la región donde ambas están definidas, que es el intervalo abierto $ (-1, 1) $. Aquí, las funciones de transición son suaves,
lo que garantiza que la circunferencia puede ser vista como una variedad diferenciable.
Este es un ejemplo básico pero ilustrativo de cómo una curva cerrada,
como una circunferencia, puede ser vista como una variedad diferenciable,
cubierta por dos cartas locales que se superponen y que permiten una descripción suave de la geometría de la curva.
Por tanto, la geometría diferencial es una rama de la matemática que combina técnicas del cálculo diferencial y la geometría para estudiar curvas, superficies y, en general, variedades. Esta disciplina permite analizar las propiedades y estructuras de espacios curvos y sus aplicaciones en diversos campos como la física, la ingeniería y la informática.
En particular, la geometría de Riemann4, una subdisciplina de la geometría diferencial, se enfoca en el estudio de variedades con una métrica que define cómo medir distancias y ángulos en espacios curvos.
Objetos Cerrados
La condición de grupo cerrado es crucial en la topología y la geometría diferencial, dado que permiten establecer propiedades importantes sobre la superficie.
En efecto, una superficie suave acotada en $\mathbb {R^3}$ es un grupo cerrado si satisface ciertas condiciones.
Una superficie suave acotada es un grupo cerrado, cuando poseen las propiedades siguientes:
i) Compacta: La superficie debe ser compacta, es decir, debe tener un volumen finito y estar acotada.
ii) Conexa: La superficie debe ser conexa, es decir, no debe tener agujeros ni ser discontinua.
iii) Suave: La superficie debe ser suave, es decir, no debe tener esquinas ni puntos singulares.
Así mismo, se deben satisfacer condiciones suficientes, que se explican en base a dos teoremas:
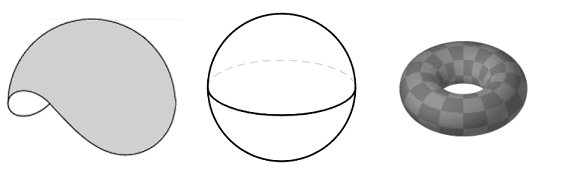
1) Teorema de Jordan-Brouwer, el cual postula que si la superficie es homeomorfa a una esfera, entonces es un grupo cerrado.
2) Teorema de Gauss-Bonnet, que dice que si la superficie tiene curvatura gaussiana constante y positiva, entonces es un grupo cerrado.
Ejemplos de superficies suaves acotadas que son grupos cerrados:
son la esfera y el toro.
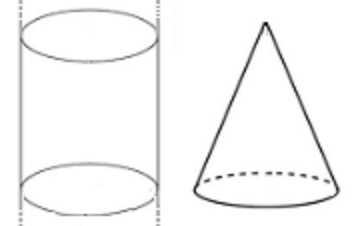
Por ejemplo otras superficies suaves acotadas, pero que no son grupos cerrados son la superficie de un cilindro infinito y la superficie de un cono.
Con esta breve presentación se explica la relación entre los grupos de Lie y la geometría diferencial, destacando su aplicación en diversas áreas como la física, inteligencia artificial y el aprendizaje automático. Los grupos de Lie combinan la estructura algebraica de un grupo con la continuidad de una variedad diferenciable, lo que permite usar cálculo diferencial para analizar estos espacios5.
Se menciona cómo las variedades diferenciables pueden ser representadas mediante "parches" locales, que son mapeos de regiones de la superficie a un espacio euclidiano. Estos parches se unen para formar una estructura suave y continua llamada atlas.
Un ejemplo sencillo es la circunferencia, que localmente se comporta como un espacio euclidiano, pero globalmente requiere dos funciones (para los semicírculos superior e inferior) que, al unirse, cubren toda la circunferencia. Este proceso es descrito a través de cartas locales que cubren el semicírculo superior $ \varphi_1 $ y el semicírculo inferior $ \varphi_2 $, ambas diferenciables en su dominio. Las funciones de transición entre estas cartas son suaves, lo que garantiza que la circunferencia sea una variedad diferenciable completa.
El artículo se complementa los artículos publicados acerca de los grupos y álgebras de Lie (Ver Mapa Publicaciones). Donde, en general se tratan ejemplos en varias variables reales.






 Video:Grupos de Lie ~ Geometría Diferencial
Video:Grupos de Lie ~ Geometría Diferencial