El Método de Publicaciones DocIRS —diseñado y desarrollado por el autor José Enrique González Cornejo— propone una forma innovadora y accesible de presentar artículos y videos científicos y matemáticos. A diferencia de las monografías académicas tradicionales en formato PDF, este enfoque apuesta por un formato interactivo, actualizable y libre, basado en el concepto de Hiperdocumento (Ver Hipertexto: Tratamiento Documental de Datos). Se aprovechan herramientas y servicios disponibles en Internet para construir un diálogo científico confiable, acumulativo y dinámico, cumpliendo además con los factores normativos de una publicación científica.
Características del Formato
Los artículos funcionan como hiperdocumentos interactivos, combinando texto, simuladores, animaciones y un menú flotante con índice central.
Se utiliza notación matemática avanzada mediante MathJax, permitiendo una visualización clara y profesional sin depender de imágenes estáticas.
Cada publicación incluye:
Notas contextuales emergentes al final de los párrafos.
Simulaciones y visualizaciones dinámicas.
Ficha técnica, mapa de publicaciones y videos complementarios.
Bibliografía y videografía enlazadas, con acceso directo a las fuentes.
En efecto, dentro del marco de información de entorno, cada artículo incorpora enlaces atingentes en la parte superior, que el lector puede consultar:
Tecnología y Plataforma
Las publicaciones están alojadas en servidores de AWS y desarrolladas sobre ASP clásico y componentes .NET, integrando JavaScript, servicios web y módulos dinámicos que permiten la visualización de notación matemática y resultados interactivos generados aleatoriamente.
Objetivo y Público
Esta propuesta está dirigida principalmente a jóvenes, docentes y entusiastas de las ciencias y la computación, y busca:
Fomentar una comprensión intuitiva de conceptos complejos.
Destacar la semántica particular de los algoritmos computacionales frente al lenguaje humano.
Promover una visión flexible y conceptual del desarrollo de algoritmos y del paralelismo computacional.
Inspirar el estudio de las matemáticas como herramienta esencial para la ciencia y la tecnología.
Todo el contenido es libre, gratuito y sin publicidad, con el fin de compartir conocimiento de manera accesible y significativa, como una contribución personal a la divulgación científica. Se busca ofrecer una mirada más cercana y conceptual que permita fortalecer la formación matemática y computacional.
La aplicación del Método de Publicaciones DocIRS abarca prácticamente toda la colección de artículos publicados desde los inicios de los años 2000. (Ver más adelante Mapa de Publicaciones y Artículos del Autor).
Tanto el Método de Publicaciones DocIRS como su soporte computacional están en constante evolución, gracias a los aportes de los usuarios y al avance continuo de la tecnología. Actualmente, ya se ha implementado la automatización del esquema del Método de Publicaciones DocIRS, permitiendo generar borradores a partir del contenido del autor mediante nuestro software propio. Además, se está desarrollando un proceso de integración de herramientas pertinentes de inteligencia artificial.
(Ver Mapa de Navegación ~ Hipertexto)
Grupo de Lie
Álgebra abstracta
Variedades diferenciables
Curvatura de Gauss
Esfera
Coordenadas cartesianas
Coordenadas esféricas
Producto escalar
Producto vectorial
Vectores tangentes
Métrica
Curvaturas principales
Curvatura de Gauss (K)
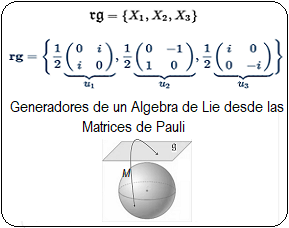
Álgebra de Lie
Riemann
Distancia
Resumen
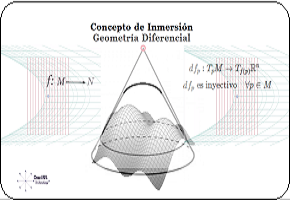
Este artículo explora un ejemplo de los conceptos fundamentales de la geometría diferencial, que proviene desde la definición de variedades diferenciables, intentando proporcionar una visión de análisis, a partir de la estructura geométrica de la esfera.
En las publicaciones fuentes acerca de las Algebras de Lie, tratadas dentro del espacio euclídeo tridimensional, se estudian superficies que admiten parametrizaciones suaves sobre el espacio tangente en un punto dado de la superficie.
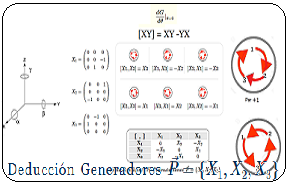
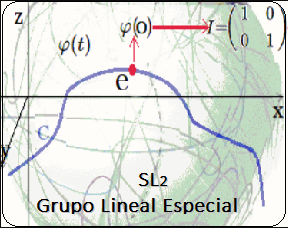
Tal como se ilustró en "Ejemplo $Sl_2$ ~ Grupo Lineal Especial y sus Generadores del Algebra de Lie", donde se muestra una curva continua y diferenciable en una variedad suave, cuyo espacio tangente sobre el elemento neutro permite, - mediante una parametrización -, deducir los generadores del Algebra de Lie de $Sl_2$.
Abstract
This article explores an example of the fundamental concepts of differential geometry, starting from the definition of differentiable manifolds, attempting to provide an analytical perspective based on the geometric structure of the sphere.
In source publications on Lie Algebras, treated within three-dimensional Euclidean space, surfaces admitting smooth parametrizations over the tangent space at a given point on the surface are studied.
As illustrated in "Example $Sl_2$ ~ Special Linear Group and its Lie Algebra Generators", where a continuous and differentiable curve on a smooth manifold is shown, whose tangent space at the neutral element allows, through a parametrization, to deduce the Lie Algebra generators of $Sl_2$.
El artículo se inicia con la curvatura de Gauss, pasando por la definición de la esfera en coordenadas cartesianas, polares y esféricas, utilizando derivadas parciales, producto escalar y vectorial, presentando el cálculo más detallado de la curvatura de Gauss y finalizando con una síntesis global del ejercicio.
1
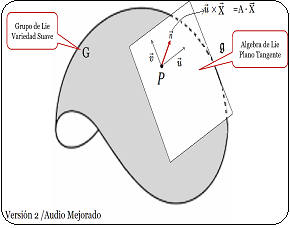
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
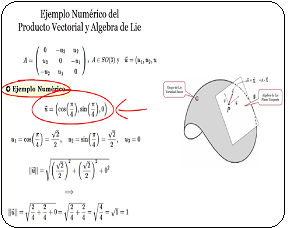
4 Los grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento de rotación $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. (Ver Aproximación Infinitesimal de las Rotaciones Pasivas)
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Lie $\longrightarrow$ Geometría
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
Geometría Diferencial ~ Ejemplo sobre la Esfera
Variedad Diferenciable ~ Algebra de Lie
La geometría diferencial es una rama de la matemática que combina
técnicas del cálculo diferencial y la geometría para estudiar curvas,
superficies y, en general, variedades. Esta disciplina permite analizar las
propiedades y estructuras de espacios curvos y sus aplicaciones en diversos
campos como la física, la ingeniería y la informática.
En particular, la geometría de Riemann1,
una subdisciplina de la geometría diferencial, se enfoca en el estudio de
variedades con una métrica que define cómo medir distancias y ángulos en
espacios curvos.
Este artículo explora un ejemplo simple de ciertos conceptos fundamentales de la
geometría diferencial, a partir de la esfera. Objeto que es una variedad
diferencial o "manifold" con una estructura geométrica perfecta para ilustrar el
concepto de curvatura sobre una superficie suave
2.
El artículo se inicia con la curvatura de Gauss, pasando por la definición de la
esfera en coordenadas cartesianas, polares y esféricas, utilizando derivadas
parciales, producto escalar y vectorial, presentando el cálculo más detallado de
la curvatura de Gauss y finalizando con una síntesis global del ejercicio.
Curvatura
de Gauss y Definición
La curvatura $K$ de Gauss para una esfera de radio $r$ es una constante
positiva, inversamente proporcional a su radio al cuadrado y está dada por:
$$ \large{K=\frac{1}{r^2}} $$
En efecto, de acuerdo al coeficiente $K$ de Gauss la curvatura es una medida
intrínseca de una superficie en un punto para una esfera de radio $r\gt 0, r\in
\mathbb R $ y se puede calcular utilizando su simetría3.
Sabemos que la esfera $ \large{S^2}$ es el conjunto de todos los puntos en el
espacio tridimensional que están a una distancia fija (el radio $ \large{r}$)
del origen:
Superfice y Volumen de una Esfera
$\times$
Superfice y Volumen de una Esfera
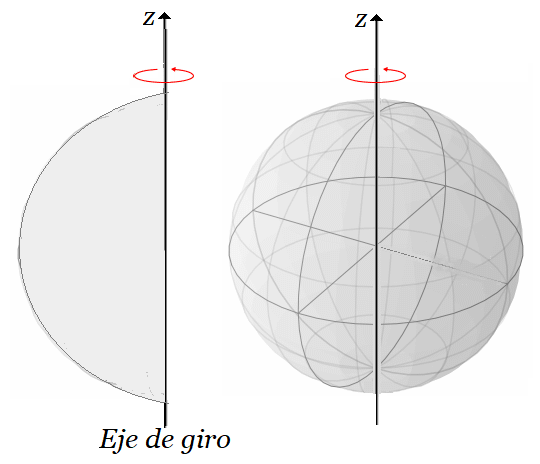
Una de las forma de calcular el área de la superficie y el volumen de una esfera
de radio $r=1$, es a partir de la ecuación del semicírculo $\sqrt{x^2 + y^2 +
z^2} = 1$ y utilizar rotaciones o revoluciones alrededor de los ejes
cartesianos.
Consideremos el semicírculo en el plano $\large {xz}$ con la ecuación:
$$ x^2 + z^2 = 1 $$
La revolución de este semicírculo alrededor del eje $\large {z}$ genera la
esfera completa.
El volumen $\large {V}$ de la esfera se calcula mediante la integral:
$$ V = \int_{-1}^{1} \pi (1 - z^2) \, dz $$
Desarrollando la integral:
$$ V = \pi \int_{-1}^{1} (1 - z^2) \, dz $$
$$ V = \pi \left[ z - \frac{z^3}{3} \right]_{-1}^{1} $$
$$ V = \pi \left(\frac{2}{3} + \frac{2}{3}\right) = \frac{4\pi}{3} $$
Entonces, el volumen de la esfera es:
$$ \bbox[8px,border:1px solid #c0c0c0]{ V = \frac{4\pi}{3} } $$
Para calular el área $\large {A}$ de la superficie, se puede usar la integral en
coordenadas polares. La superficie de revolución de la semicircunferencia
alrededor del eje $\large{z}$ genera la esfera.
Luego:
$$ A = \int_{-1}^{1} 2\pi r \, dz = 2\pi \int_{-1}^{1} \sqrt{1 - z^2} \, dz $$
Donde $r = \sqrt{1 - z^2}$ es el radio del círculo en cada $\large{z}$.
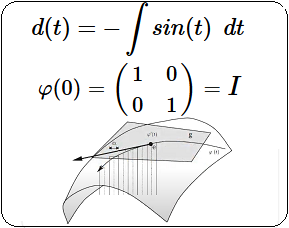
Esta integral se resuelve usando una sustitución trigonométrica, $\large{z =
\sin \theta}$, que finalmente lleva a:
$$ A = 2\pi \times 2 = 4\pi $$
Entonces, el área de la superficie de la esfera es:
$$ \bbox[8px,border:1px solid #c0c0c0]{ A = 4\pi } $$
Donde $ \large{S^2}$, - centrada en un origen $(0,0,0)$ -, se expresa
cartesianamente en el espacio euclidiano con coordenadas, como:
Las coordenadas esféricas $\large{(r, \theta, \phi)}$ están relacionadas con las
coordenadas cartesianas $\large{(x, y, z)}$ por las siguientes ecuaciones:
$$ \left. \begin{array}{l} x = r \sin \theta \cos \phi \\ y = r \sin \theta \sin
\phi \\ z = r \cos \theta \end{array} \right\} \quad[EC_2] $$
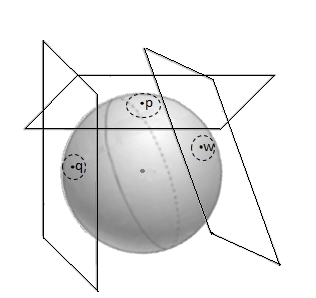
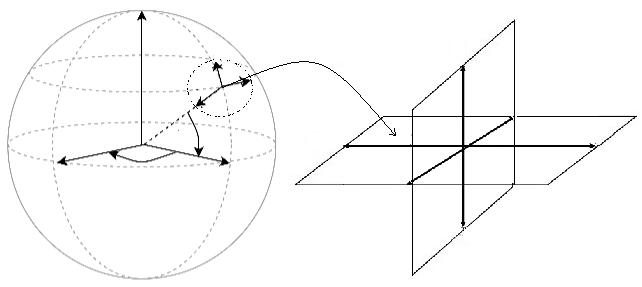
Para trabajar con la esfera $\large{ S^2 }$ en geometría diferencial, se usan
cartas que son homeomorfismos locales4
entre $\large{S^2 }$ y $\large{\mathbb{R}^2}$, como se señala en la figura
siguiente.
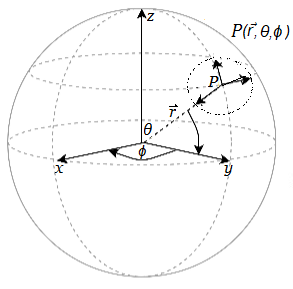
$P(\vec{r},\theta, \phi)\longrightarrow S^{2}$ 5
Donde el sistema de coordenadas esféricas también bajo coordenadas polares
determina la posición espacial de un punto $P$ mediante una distancia y dos
ángulos.
Nótese que las coordenadas esféricas y las coordenadas polares son sistemas de
coordenadas utilizados para describir posiciones en el espacio, pero se aplican
en diferentes contextos y dimensiones. La diferencia entre estos dos sistemas de
coordenadas es que las polares se utilizan para describir puntos $(\vec
{r},\theta)$ en un plano 2D (distancia radial y un ángulo.), y las esféricas
para describir puntos $(\vec {r},\theta,\phi)$ en un espacio 3D, utilizando una
distancia radial, un ángulo polar y un ángulo azimutal.
$$P=\unicode{123} (\vec{r},\theta, \phi) \text{ | } \mathit{ 0 \le \vec {r} \le
\infty \quad \land \quad 0 \le \theta \le \pi \quad\land \quad 0 \le \phi \le
2\pi} \unicode{125}$$
Es decir, $P$ se representa por un conjunto de tres magnitudes,
$P(\vec{r},\theta, \phi)$. Donde $\large{\vec{r}}$ es el radio de la esfera $ 0
\le \large{\vec {r}\le \infty }$ , $ \large{\theta}$ es el ángulo polar $
\large{0 \le \theta \le \pi }$ (colatitud) y el ángulo $\large{\phi}$ (azimutal)
$ 0 \le \large{\phi \le 2\pi}$. Los rangos y sus variaciones se definen por
convención.
Luego, usando $[EC_2]$, el punto $P(\vec{r},\theta, \phi)$
se determina con el siguiente sistema de expresiones parametrizadas de la
esfera:
$$ \left. \begin{array}{l} x = r \sin \theta \cos \phi \\ y = r \sin \theta \sin
\phi \\ z = r \cos \theta \end{array} \right\}P(\vec{r},\theta, \phi) $$
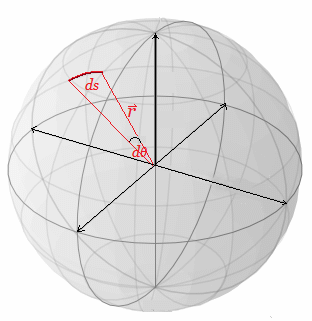
Elemento
de Línea $\large {ds}$
La métrica en $\large{S^2}$ es inducida por la métrica euclidiana en
$\large{\mathbb{R}^3 }$. En coordenadas ($\large{ \theta, \phi }$), el elemento
de línea $\large{ds}$ es:
Elemento de Línea $\large{\Delta s\longrightarrow ds}$6
Esta expresión entrega la distancia entre dos puntos infinitesimalmente cercanos
en $\large{S^2}$. En efecto, derivando parcialmente: las coordenadas cartesianas
con respecto a $\large{\theta}$ y $\large{\phi}$, se tiene respectivamente:
$$ \left. \begin{array}{l} \large{\frac{\partial x}{\partial \theta} = r
\cos(\theta) \cos(\phi) }\\ \large{\frac{\partial y}{\partial \theta} = r
\cos(\theta) \sin(\phi) }\\ \large{\frac{\partial z}{\partial \theta} = -r
\sin(\theta) }\\ \,\\ \hline\\ \large{ \frac{\partial x}{\partial \phi} = -r
\sin(\theta) \sin(\phi)} \\ \large{ \frac{\partial y}{\partial \phi} = r
\sin(\theta) \cos(\phi)}\\ \large{ \frac{\partial z}{\partial \phi} = 0} \end{array}
\right\} \quad[EC_4] $$
Donde las derivadas parciales $\large{\frac{\partial P}{\partial \theta}}$ y
$\large{\frac{\partial P}{\partial \phi}}$ proporcionan los vectores tangentes a
la esfera en el punto $P$:
En efecto, el cálculo del producto escalar o interno de las derivadas parciales
$[EC_6]$ que proporcionan los vectores tangentes a la esfera en un punto
$P$, con las coordenadas $(\theta,\phi)$, de donde se obtiene el elemento de
línea $ds^2$, que es una expresión que describe cómo calcular la distancia
infinitesimal entre dos puntos infinitesimalmente cercanos en la variedad.
Cálculo
de $\pmb{ds^2}$
Por tanto, utilizando el cálculo extendido del producto interno de los
componentes métricos $\large{g_{\theta\theta}, g_{\theta\phi}, g_{\phi\phi}}$ ($[EC_6]$),
se obtiene la distancia infinitesimal $ds^2$ que es elemento de línea
considerando en coordenadas esféricas, que representa la métrica de una esfera
de radio $r=1$. En otros términos, se tiene que:
Se considera una esfera de radio unitario a fin de simplificar el desarrollo,
i.e. los componentes métricos se obtienen aplicando el producto escalar de
vectores en espacio vectorial en $\mathbb {R}^3$,
Donde el producto interno (métrico) de los vectores tangentes en
coordenadas esféricas se utiliza para obtener el elemento de línea (distancia
infinitesimal al cuadrado) $\large{ds^2}$ previamente rotulada como
$[EC_3]$:
Sustituyendo los componentes métricos obtenidos, resulta
$[EC_3]$:
$$ \large{ds^2 = d\theta^2 + \sin^2 \theta\text{ }d\phi^2} $$
Luego, $ds^2$ es el elemento de línea en coordenadas esféricas, que representa
la métrica de una esfera de radio $r=1$.
En geometría diferencial se entiende como la métrica de una variedad
diferencial mediante la descripción del "elemento de línea $ds$"8,
el cual proporciona una manera de medir distancias y ángulos en una variedad
diferenciable.
Cálculo
Curvatura de Gauss
Para calcular la curvatura de Gauss, primero necesitamos los vectores tangentes
a la esfera en un punto $(\theta, \phi)$. Estos vectores se obtienen tomando las
derivadas parciales de $\mathbf{r}(\theta, \phi)$ con respecto a $\theta$ y
$\phi$:
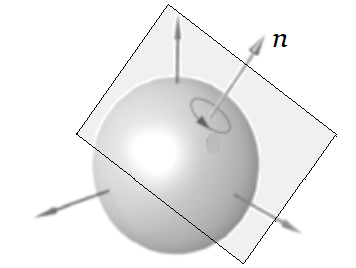
El vector normal $\pmb{\vec n}$ a la superficie se obtiene tomando el producto
cruz (o vectorial) de los vectores tangentes $\mathbf{\vec r}_\theta$ y $\mathbf{\vec
r}_\phi$ 9:
La curvatura de Gauss $ K $ de una superficie se define como el producto de las
curvaturas principales $\kappa_1$ y $\kappa_2$12.
Para una esfera, ambas curvaturas principales son iguales y se pueden calcular
como el inverso del radio $ r $:
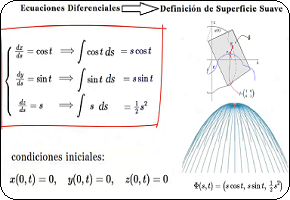
Para encontrar una función cartesiana $f(x,y,z)$ de una curva continua y
diferenciable que se desliza sobre la superficie de una esfera de radio $r=1$,
centrada en $(0,0,0)$ y que pasa por los puntos $P_1 = (1, 0, 0)$ y $P_2 = (0,
0, 1)$, se considerará la parametrización de la curva en términos de coordenadas
esféricas.
Es decir, se resolverá a partir de una función $\varphi(t)$ parametrizada en $t$
con coordenadas esféricas, tal que $\varphi(t)$ cumple con pasar por esos puntos
localizados.
Entonces, utilizando la equivalencia referenciada en $[EC2]$,
se tiene que:
donde $ \theta $ es el ángulo azimutal y $ \phi $ es el ángulo polar.
Utilizando los dos puntos {$P_1 , P_2 $} dados se puede establecer la relación
entre los ángulos $ \theta $ y $ \phi $ a lo largo de la curva, i.e. determinar
la función cartesiana, parametrizando linealmente los ángulos:
Donde $t$ es un parametro que varía en el intervalo $[0,1] \subset
\mathbb {R}$ y $a,b,c,d \in \mathbb {R}$
Sustituyendo $ \theta(t) $ y $ \phi(t) $ en la parametrización esférica, se
obtiene la curva en forma cartesiana:
$$ \left. \begin{array}{l} x(t) = \cos(\theta(t)) \sin(\phi(t)) \\ { } \\ y(t) =
\sin(\theta(t)) \sin(\phi(t)) \\ { } \\ z(t) = \cos(\phi(t)) \end{array}
\right\} \quad [EC_8] $$
Con este sistema de ecuaciones que cumple con las condiciones especificadas por
la curva $\varphi(t)$, se deduce la función cartesiana buscada sobre la esfera
unitaria, centrada en el origen, y que pasa por {$P_1, P_2$}.
En efecto, con los puntos conocidos $P_1 = (1, 0, 0)$ y $P_2 = (0, 0, 1)$ y con
la ecuación de la esfera $[EC_1]$:
Se tiene que $ t = 0 $ corresponde al punto $ (1, 0, 0) $ y $ t = 1 $
corresponde al punto $ (0, 0, 1) $.
Luego, la función cartesiana que describe esta curva en la esfera es:
$$ f(x, y, z) = x^2 + z^2 - 1 = 0 $$
Por ejemplo en la figura previa, esta ecuación describe una curva en la esfera,
que pasa por los puntos dados, se puede interpretar como el arco de un círculo
máximo de la esfera que conecta los puntos $(1,0,0)$ y $(0,0,1)$, donde la curva
se encuentra en el plano $ y = 0 $ debido a que el valor de $ y(t) = 0 $ es
constante.
Síntesis
Exposición
Con este ejemplo de Geometría Diferencial propuesto, acerca de la clásicas
curvas y superficies en el espacio15,
con la pretensión de complementar los artículos publicados acerca de los grupos
y álgebras de Lie (Ver Mapa
Publicaciones). Donde, en general se tratan ejemplos en varias variables
reales.
El propósito de esta exposición es abordar la geometría diferencial iniciando
con el concepto de curvatura sobre una esfera, donde la curvatura es un
invariante completo para las curvas planas.
Por eso, el artículo comenzó con la definición del
coeficiente de Gauss $ K $ de una esfera, que es una medida intrínseca de la
curvatura de una superficie en un punto de esa variedad de radio $ \vec r $.
Curvatura que se puede calcular con la ecuación paramétrica de esta superficie
lisa diferencial en coordenadas esféricas $(\theta, \phi)$ ver
$[EC_3]$. Así mismo, el ejemplo se cierra con el
procedimiento de su cálculo de la medida $ K $ de Gauss y un ejercicio de
búsqueda de una función continua y derivable sobre la esfera .