Palabras claves
Ejemplo Sl2
Grupo Lineal Especial
Generadores del Algebra de Lie
álgebra de lie,
grupo de lie,
variedad diferenciable,
Variedad topológica
manifold,
Variedad Suave
Particular Ejemplo $Sl_2(R,·)$
Ejemplos Estructuras Suaves
mapeo grupos,
plano tangente,
algebra de lie asociada,
función diferenciable,
punto neutro,
superficie lisa tridimensional,
Conmutadores Algebra Lie $\mathfrak{\Large g}$,
representación algebra de lie
$Sl_2$ es un grupo de Lie muy representativo, que permite ilustrar cómo se obtienen tres matrices generadoras de un Algebra de Lie, como así mismo mostrar su estructura algebraica. En efecto, desde esta conformación de grupo $Sl_2 \in GL(R2,·)$, i.e,. el conjunto de matrices de $2×2$ cuyas determinantes son igual a uno, se le asocia un Algebra de Lie $\large{\mathfrak {g}}$.
Es central inicialmente comprender que la correspondencia entre el Grupo de Lie y el Algebra de Lie permite estudiar los grupos de Lie, que son objetos geométricos, en objetos lineales dentro del Algebra de Lie 141.
En efecto, esta correspondencia entre objetos geométricos y objetos lineales son fundamentales para la Teoría de Grupos de Lie, particularmente sobre los grupos continuos que se comportan de manera suave. 147
En el ejemplo del presente artículo se tratará, el grupo de rotaciones en el espacio tridimensional. El grupo especial lineal $Sl_n$ de matrices con determinante igual a uno.
1
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Estos grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. (Ver Aproximación Infinitesimal de las Rotaciones Pasivas)
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
El presente video es la síntesis del artículo ejemplo $Sl_{2}$ grupo lineal especial y sus generadores del álgebra del Lie, que a su vez es un extracto del documento "Definición Algebra de Lie Variedad Diferenciable", publicaciones que se encuentran en el marco de una serie de artículos y videos relacionados a este concepto.
Aquí adjunto sus URL y códigos QR respectivamente.
El propósito de este anexo complementario de desarrollar algebraicamente, a partir de una variedad diferencial es fundamental en la Teoría de Grupos y tiene muchas aplicaciones en física, geometría, álgebra, robótica, data science,..
El ejercicio muestra cómo la función genérica $\varphi(t)$ definida sobre la superficie de $Sl_{2}$ proporciona los generadores del álgebra asociado a este grupo.
El desarrollo, lo haré mediante un proceso específico de mapeo entre la función real genérica, - diferenciable y continua-, sobre la variedad, utilizando la derivada sobre el elemento neutro del grupo, su plano tangente en el contexto particular del problema que estamos abordando.
Es decir, desde ahí se obtienen los generadores que son los operadores lineales que generan las transformaciones infinitesimales de su grupo de Lie.
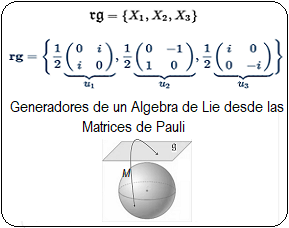
En resumen, los generadores de Lie se obtienen a partir de un grupo de Lie y sus representaciones, que denotaremos con las letras $\mathfrak{rg}$ en letra gótica.
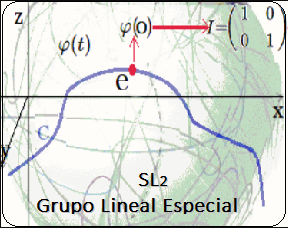
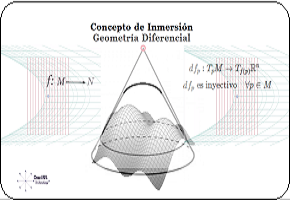
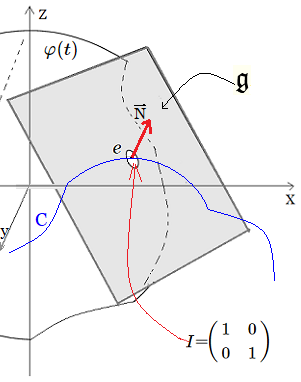
La idea de introducir este ejemplo geométrico, partiendo desde el grupo lineal especial $Sl_{2}$ con una variedad suave, como se muestra en la figura.
La cual, va a contener una función genérica $\varphi(t)$ sobre la superficie.
Es decir, $\varphi(t)$ es simplemente una función continua y diferenciable definida sobre este objeto.
En este caso la variedad se refiere a la superficie sobre la cual se estudia la función genérica $\varphi(t)$.
El desarrollo algebraico mostrará que las propiedades de $Sl_{2}$ se relacionan con la geometría subyacente y proporcionan un marco para definir funciones sobre esa superficie.
El grupo especial de $Sl_{2}$ es un grupo de matrices especiales de tamaño $2 \times 2$ con determinante igual a uno.
Como muestro aquí, donde los elementos de esta matriz {$a,b,c,d$} los vamos a definir como números reales, pero se podrían definir también sobre los números complejos.
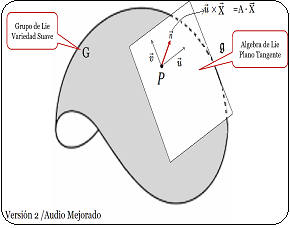
Aquí tenemos una variedad diferenciable suave en un n-dimensional espacio sobre los números reales.
Esta superficie tiene la estructura de un grupo $G$ eso implica que si tomo dos elementos $p_1$ y $p_2$ de $G$, al operarlos con la operación binaria propia del grupo, se obtendrá un nuevo elemento $p_3$ que también está en $G$, dado que toda estructura de grupo es cerrada.
Luego, se busca el elemento neutro del grupo, que aquí se muestra con la letra "e", punto sobre el cual se despliega el plano tangente que llamamos $\mathfrak{g}$ minúscula con letras gótica.
Entonces, si $G$ es un grupo de Lie su plano tangente $\mathfrak{g}$ letra gótica minúscula, es un álgebra de Lie.
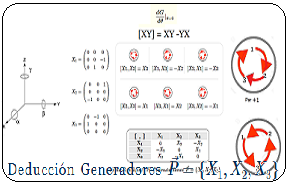
En este ejemplo, se mostrará mediante un desarrollo algebraico que las tres matrices generadoras de un álgebra de Lie desde $Sl_{2}$, se denotan de la siguiente forma estas tres matrices $\mathfrak{rg}$ que generan el álgebra del $Sl_{2}$, se relacionan mediante el plano tangente y la operación corchetes de Lie.
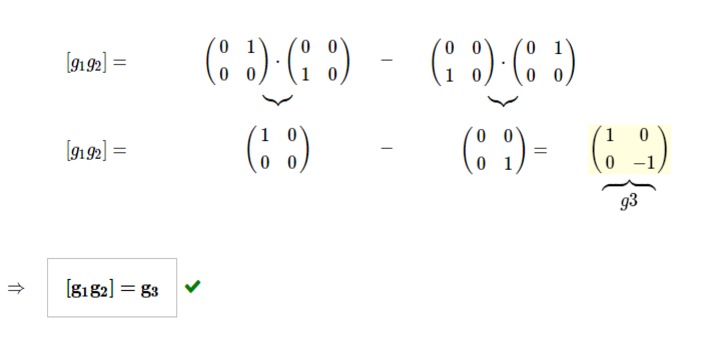
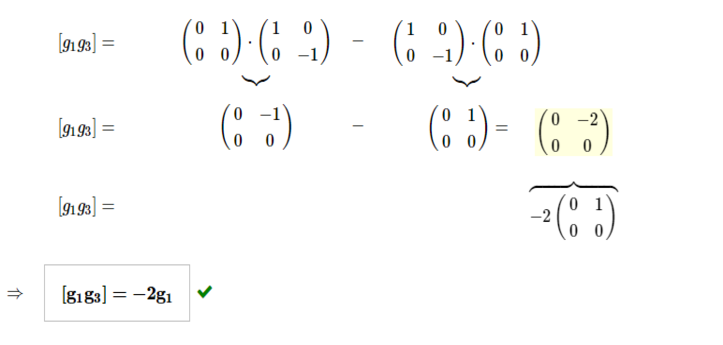
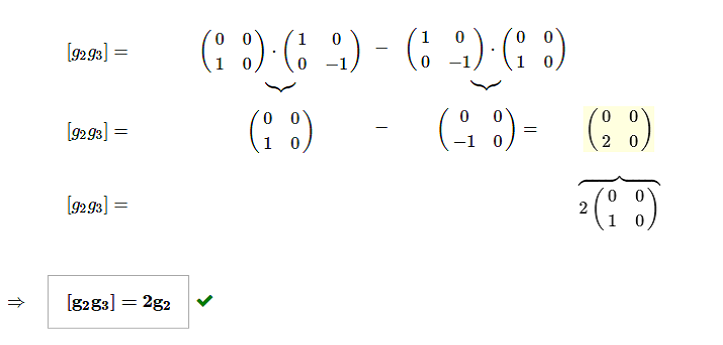
Recordar que el conmutador o corchetes de Lie de dos matrices $[X Y]$ se definen como señalo aquí $[X Y]=XY-YX$.
El plano tangente en un punto de la variedad diferenciable es $Sl_{2}$ es un espacio vectorial que aproxima la variedad en ese punto.
En este caso de $Sl_{2}$ el plano tangente en la matriz identidad es el espacio de matrices de $2 \times 2$ con traza igual cero.
Esto significa que cualquier matriz en el plano tangente en el punto neutro $e$ puede escribirse como una combinación lineal de estas tres matrices.
Además el conmutador de dos matrices $\mathfrak{rg}$ da como resultado otra matriz en el plano tangente.
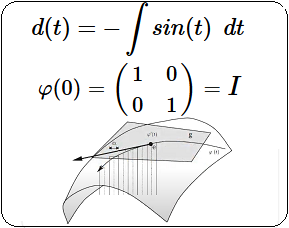
Aquí la función $\varphi(t)$ con sus elementos parametrizados sabemos que $\varphi(0)$ del neutro es igual a la identidad, i.e. la matriz idéntica.
Eso implica que los valores en el neutro.
Es decir, en cero de los elementos de la matriz $\varphi(t)$ serían $a(0) = d(0) = 1$ y $b(0) = c(0)= 0$.
Esto implica además, que $\varphi(t)$ y su matriz determinante sería $\varphi(t)=a(t) \cdot b(t) - b(t) \cdot c(t)$ y eso es igual a 1 por definición de $Sl_{2}$.
Una vez hecho esto vamos a la derivada.
La derivada $\varphi'(t)$ sería igual a la derivada de los elementos parametrizados de cada uno de los cuatro elementos de la matriz $\varphi'(t)$.
Si asignamos con la letra $X$ a los generadores de la álgebra de Lie tendríamos una matriz que tiene elementos {$x, y, z, w$}, donde $\varphi'(t)$ evaluada en $0$ sería $a'(t),b'(t), c'(t), d'(t)$. Que son los elementos de la matriz y cada uno de ellos va a ser respectivamente igual a {$x, y ,z ,w$} como señalo aquí.
Ahora, vamos a derivar implícita ente esta función $\varphi(t)$.
Derivando esta expresión con determinante igual a $1$, implícitamente.
Obtendríamos esta derivada que estoy señalando acá: $[a'(t)\cdot d(t) + d'(t) \cdot a(t)]-[b'(t) \cdot c(t) + b(t) \cdot c'(t)]=0$
Todo eso igual a $0$.
Dado que la derivada de una constante es cero.
Evaluando en $t = 0$ y sustituyendo los valores, -antes vistos-, tendríamos que $a'(0)=x, d'(0)=w, b'(0)=y, c'(0)=z$
Sustituyendo ahora los valores de la identidad, osea de la función $\varphi(0)$ (evaluada en cero), tendríamos que $a(0)=d(0) = 1$ y $b(0) = c(0) = 0$
Reemplazando en esta expresión esos valores vamos a llegar a que $\varphi'(0)$ es igual a $a'(0)$ más $d'(0)$ y todo eso igual a cero.
Donde $\mathfrak{rg}$ es el conjunto de todas las matrices $X$, cuyos elementos son {$x, y, z, w$} Donde se da la condición de que $x=-w$.
Una vez sustituyendo en estas matrices unitarias, las posibles combinaciones con ceros y unos, obtenemos entonces las matrices unitarias que cumplen con esta especificación.
Que son $\mathfrak{rg}$ las matrices que estoy señalando acá con las que iniciamos este ejemplo.
Se ha mostrado que desde el producto vectorial de este grupo de Lie $Sl_{2}$ se obtienen tres generadores.
$Sl_{2}$ puede ser {$E, F, H$} o la representaciones del álgebra {$g1, g2, g3$}, donde las relaciones de conmutación de estas matrices con la operación binaria corchetes de Lie se señalan a continuación con ambas notaciones.
La operación binaria colchetes de Lie cumple con las propiedades requeridas para constituir un álgebra de Lie.
Son bilineales antisimétricas y satisfacen la Identidad de Jacobi. El ejercicio muestra que las representaciones $\mathfrak{rg}$ es un conjunto de vectores de álgebra de Lie que puede ser utilizado operando los corchetes de Lie para obtener cualquier elemento del espacio.
En otros términos, todo elemento del álgebra de Lie $\mathfrak{g}$, puede ser expresado como una combinación lineal de los generadores de base $\mathfrak{rg}$.
La directa y estrecha relación entre el grupo del Lie y su correspondiente álgebra, es unívoca.
Esta conexión se manifiesta ilustrado en este ejercicio entre los generadores de ambas estructuras y las representaciones $\mathfrak{rg}$ y los generadores infinitisimales del grupo de Lie $Sl_{2}$.
$\large{Sl_2}$ es un grupo de Lie muy representativo y se presta para generar un Algebra de Lie, como así mismo para
ilustrar su estructura algebraica son sus elementos de transformación lineal mediante la llamada Teoría de las Representaciones, la cual será mencionada al fin de esta demostración 150.
Desde esta conformación de grupo $Sl_2 \in GL(\mathbb R^2,\text{·})$, se define como el conjunto de matrices de $2 \times 2$ cuyas determinantes son igual a uno, - rotulada como $(AL1)$. A este grupo de Lie $Sl_2$, es posible asociarle un Algebra de Lie $\large{\mathfrak g}$, mediante una aproximación geométrica.
Nota.- Téngase presente que cualquier Algebra de Lie es por definición un espacio vectorial con un producto (el conmutador) que satisface las propiedades de ser bilineal, antisimétrica y cumplir con la identidad de Jacobi.
Aún más, dada la definición de $Sl_2$ es importante recordar que la determinante de una matriz cuadrada es un polinomio de sus entradas, por lo que es infinitamente diferenciable.142
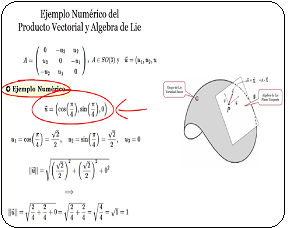
A continuación se mostrará que desde $Sl_2 \times Sl_2 \longrightarrow Sl_2$, de obtienen tres generadores de $\large{\mathfrak {g}}$, i.e. $Sl_2=\pmb{span\unicode{123}E,F,H\unicode{125}}$,- (Esa es la notación estándard, aquí se utilizará la notación $\pmb{\mathfrak{rg}=\unicode{123}g_1,g_2,g_3\unicode{125}}$). Estos generadores son matrices unitarias que van a ser conmutadas con la operación binaria corchetes de Lie, resultando $\large{\mathfrak {g}}$ es el conjunto de matrices antisimétricas, que llamaremos Algebra de Lie del grupo $Sl_2$:
$$\large{\mathfrak {g}}=\unicode{123} M \in \mathbb{R^n} \text{ / }
\underbrace{M^T=-M}_{\text{Antisimetría}} \unicode{125}$$
En efecto, si parametrizamos los elementos de la matriz $M$ en $(AL1)$ como $a(t),b(t),c(t),d(t)$, i.e. con una función diferenciable $\varphi(t) \in Sl_2(\mathbb R)$, entonces se puede asumir que existe una curva $C$ que se desplaza sobre la superficie lisa del objeto.
Luego, bosquejamos en la figura#1 una curva $C$ continua y diferenciable que se desliza sobre esa (manifold) superficie suave tridimensional:
Fig#1 $\large{\varphi(t)}$: Curva $C$ sobre Variedad Suave
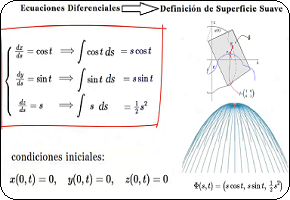
Entonces, $(AL1)$, en términos paramétricos se expresa con la siguiente la matriz:
$$\varphi(t)=\begin{pmatrix}
a(t) & b(t)\\c(t) & d(t)\\
\end{pmatrix}\qquad\quad \bbox[FFFFE0]
{(AL2)}$$
Es decir, se asume que esta función $\varphi(t)$ del grupo $Sl_2$, determina una curva sobre la variedad en el plano 3-dimensional euclidiano, de modo que tiene un punto neutro igual a la idéntica. (Ver figura #2)135
Luego, al evaluar la derivada $\varphi(t)$ de la función en el punto identidad $I$, se genera un plano tangente a la variedad en ese punto, y consecuentemente un Algebra de Lie asociada. Es decir, el Algebra de Lie de un Grupo de Lie, es definido como el espacio tangente en la identidad.
Ilustremos su demostración:
Sea $X=\begin{pmatrix}
x & y\\z & w\\
\end{pmatrix}
$, el conjunto de matrices de $2\times 2$ que genera un álgebra de Lie $\large{\mathfrak g}$.
Nota.- En otras palabras, la matriz $X$ generadora del Algebra de Lie $\large{\mathfrak g}$ es la derivada de la función $\large{\varphi(t)}$ evaluada en $\large{t=0}$, por tanto $\large{\unicode{123}x,y,z,w\unicode{125}\equiv \unicode{123}a'(0),b'(0),c'(0),d'(0)\unicode{125}}$. Notación de elementos respectivos, que se utilizarán indistintamente en el presente desarrollo.
Se asume que existe una curva $C$, definida por $\varphi(t)$ , tal que:
$$\varphi(\mathbb R):\longrightarrow Sl_2(\mathbb R)$$
$\Rightarrow$
$$\varphi(t)=\begin{pmatrix}
a(t) & b(t)\\c(t) & d(t)\\
\end{pmatrix}=a(t)d(t)-b(t)c(t)=1\qquad\quad \bbox[FFFFE0]
{(AL4)}
$$
Evaluando la función $\varphi$ en el neutro $e$, i.e. en $t=0$ y sabiendo que $\varphi(0)=I$, tenemos:
Evaluando la derivada $\varphi'(t)$ en $t=0$ y usando $(AL5)$, tenemos:
$$ \underbrace{a'(0)}_{\large{x}} d(0) + a(0)\underbrace{d'(0)}_{\large{w}}-\underbrace{b'(0)}_{\large{y}}c(0)-b(0)\underbrace{c'(0)}_{\large{z}})=0$$
Sustituyendo los valores de $(AL4.1)$, i.e. $a(0)=d(0)=1 \land b(0)=c(0)=0$ en $(AL6)$ y simplificando:
$\unicode{123}E,F,H\unicode{125}$ es una notación estándard equivalente, utilizada en variadas pubilicaciones para referirse a estas tres matrices generadoras $\unicode{123}g_1,g_2,g_3\unicode{125}$.
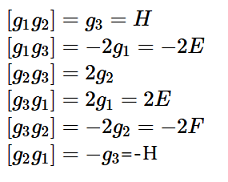
Conmutadores del Algebra de Lie $\large{\mathfrak g}$
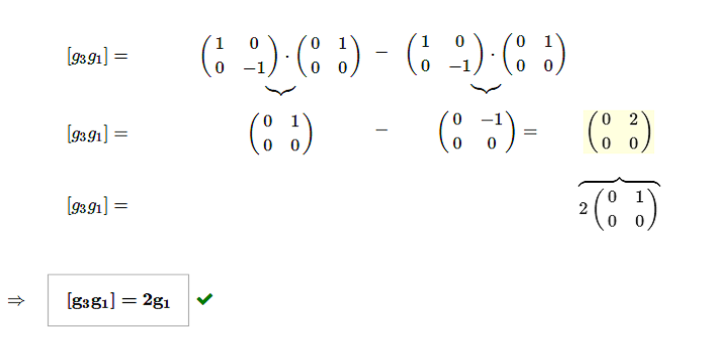
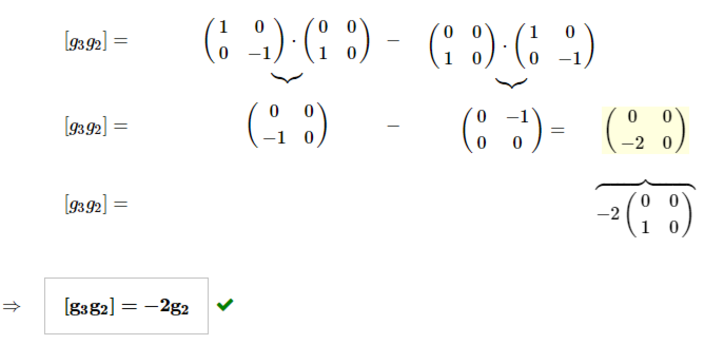
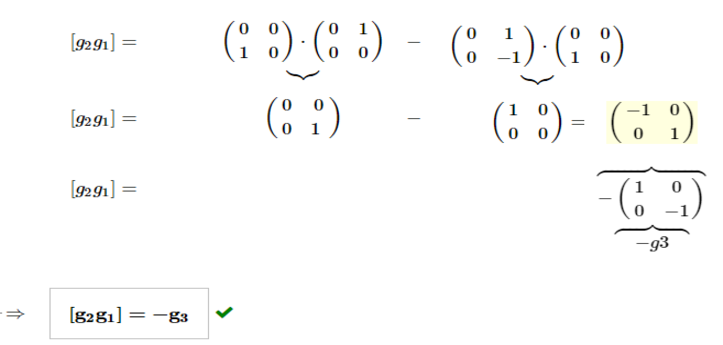
Aplicamos al conjunto $\large{\mathfrak{rg}=\unicode{123}g_1,g_2,g_3\unicode{125}}$ la operación binaria Corchetes de Lie, $[XY]=XY-YX$, para probar que cumple las propiedades89 requeridas para constituir un Algebra de Lie.
Veremos una síntesis de los resultados en la siguiente tabla:
Tabla con Corchetes de Lie ~ Generadores $Sl_2$
[· , ·]
$\mathbf {g_1}$
$\mathbf {g_2}$
$\mathbf {g_3}$
$\mathbf {g_1}$
$0$
$g_3$
$-2g_1$
$\mathbf {g_2}$
$-g_3$
$0$
$2g_2$
$\mathbf {g_3}$
$2g_1$
$-2g_2$
$0$
Explícitamente, operando matricialmente:
Luego, desde un punto de vista de la geometría euclídea este grupo especial $Sl_2$ se conecta con un Algebra de Lie $\large{\mathfrak g}$ mediante una representación que llamamos $\large{\mathfrak{rg}}$ del espacio tangente al punto Identidad, utilizando la operación binaria, - previamente definida -, Corchetes de Lie, i.e. se satisfacen las propiedades de ser bilineal, antisimétrica y cumplir con identidad de Jacobi.
El grupo lineal especial $Sl\subset G(n)$, se puede generalizar a un Algebra de Lie $\large{\mathfrak {g}}$, formada por todas las matrices de $n\times n$, sobre el cuerpo de los reales o complejos y cuya traza es nula.
Particularmente en los reales, $\large{\mathfrak {g}}$ es el conjunto de todas las matrices n-dimensionales antisimétricas, que llamaremos Algebra de Lie del grupo $Sl_n$.
Definida como:
$$\large{\mathfrak {g}}=\unicode{123} M \in \mathbb{R^n} \text{ / }
\underbrace{M^T=-M}_{\text{Antisimetría}} \unicode{125}$$
Cierre de la Demostración
Por tanto, se ha mostrado que desde el
producto vectorial de este grupo de Lie $\mathbf {Sl_2}$ se obtienen tres generadores. Es
decir, $\mathbf {Sl_2=}$span$\unicode{123}\mathbf {E, F, H}\unicode{125}$ o $\large{\mathfrak {rg}}=\unicode{123}\mathbf {g1, g2, g3}\unicode{125}$. Esta última $\large{\mathfrak {rg}}$, es la notación utilizada en este artículo.
Estos tres generadores $\large{\mathfrak {rg}}$ son las matrices unitarias:
Donde, las relaciones de conmutación de estas matrices con la operación binaria Corchetes de Lie, se señalan a continuación con ambas notaciones ($\mathfrak{rg}=\unicode{123}E,F,H\unicode{125}\equiv \unicode{123}g_1,g_2,g_3\unicode{125}$):
Desde ahí resulta $\large{\mathfrak {g}}$, que es el conjunto de matrices antisimétricas que llamaremos Algebra del Lie del Grupo $\mathbf {Sl_2}$
El ejercicio muestra que $\large{\mathfrak {rg}}$ es un conjunto de vectores del álgebra de Lie que pueden ser utilizados operando con los corchetes de Lie para obtener cualquier elemento del espacio.
En otrós términos, todo elemento del Algebra $\large{\mathfrak {g}}$ puede ser expresado como una combinación lineal de los generadores de base $\large{\mathfrak {rg}}$.
Lo interesante es que $\large{\mathfrak {g}}$ permite estudiar las propiedades del grupo de Lie de una forma más algebraica, i.e. sin recurrir a la propiedades geométricas específicas del grupo, lo que resulta especialmente útil en el estudio de los grupos de Lie y sus aplicaciones como la Geometría Diferencial y la teoría de representaciones.
La directa y estrecha relación entre el grupo de Lie y su correspondiente álgebra es unívoca147.
Esta conexión se manifiesta. - ilustrado en este ejercicio -, entre los generadores de ambas estructuras, i.e. $\large{\mathfrak {rg}}$ y los generadores infinitesimales del grupo de Lie $Sl_2$ 160. (Ver Puertas Cuánticas de Pauli ~ Base de un Algebra de Lie
Otro Ejemplo de Representación de Algebra de Lie
El hecho de que $Sl(n,R)$ sea simple, pone a disposición la teoría de las representaciones de álgebras de Lie para ilustrar en muy buena forma un natural ejemplo de aplicación.
Extendiendo las tres matrices unitarias generadoras del Algebra de Lie asociada, que satisfacen condición $a+d=0$, las cuales se rotulan como span $\unicode{123} H,E,F \unicode{125}$, de donde:
Diagramando y explicando detalladamente una representación de $(AL7)$ con un punto para cada dimensión, (i.e. en 5 dimensiones).
Conectando en dirección hacia la derecha los puntos, después en dirección opuesta y tambien conexión de los puntos consigo mismo.
Posteriormente mostrando como se satisfacen las operaciones de los corchetes de Lie en la representación gráfica.
Representación: $G$ $\longrightarrow$ Algebra de Lie $\large{\mathfrak {g}}$141






 Ejemplo Sl2
~ Grupo Lineal Especial
Ejemplo Sl2
~ Grupo Lineal Especial
.png)