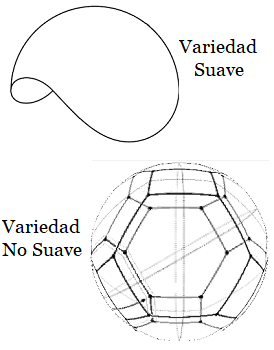
variedad diferenciable
grupo de Lie
álgebra de Lie
mapa exponencial
estructura diferencial
estructura algebraica
grupo de rotaciones
SO(3)
teoría de Lie
geometría diferencial
Resumen
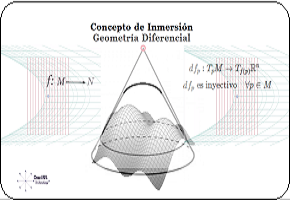
Este artículo explora la transición de una variedad diferenciable hacia un grupo de Lie resaltando la interacción entre la estructura diferencial y la estructura algebraica.
Se introduce el concepto de variedad diferenciable como un espacio topológico suavemente parametrizable y se describe la incorporación de la estructura de grupo mediante operaciones compatibles con la diferenciabilidad.
Se presentan los fundamentos del álgebra de Lie asociada su papel en la descripción de la estructura local del grupo y la importancia del mapa exponencial en la conexión entre el álgebra y el grupo de Lie.
Finalmente, se discute el caso particular del grupo de rotaciones SO(3) como un ejemplo ilustrativo mostrando cómo los conceptos desarrollados se aplican en un contexto concreto.
Abstract
This article explores the transition from a differentiable manifold to a Lie group highlighting the interaction between differential and algebraic structures.
The concept of a differentiable manifold is introduced as a smoothly parametrizable topological space and the incorporation of a group structure is described through operations compatible with differentiability.
The fundamentals of the associated Lie algebra are presented emphasizing its role in describing the local structure of the group and the importance of the exponential map in connecting the algebra with the Lie group.
Finally, the specific case of the rotation group SO(3) is discussed as an illustrative example demonstrating how the developed concepts apply in a concrete context.
1
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Los grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
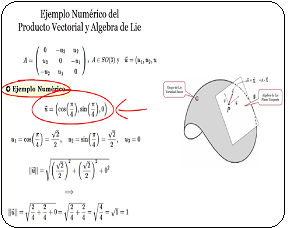
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento de rotación $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
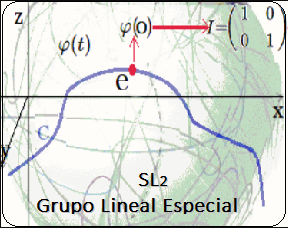
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. (Ver Aproximación Infinitesimal de las Rotaciones Pasivas)
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
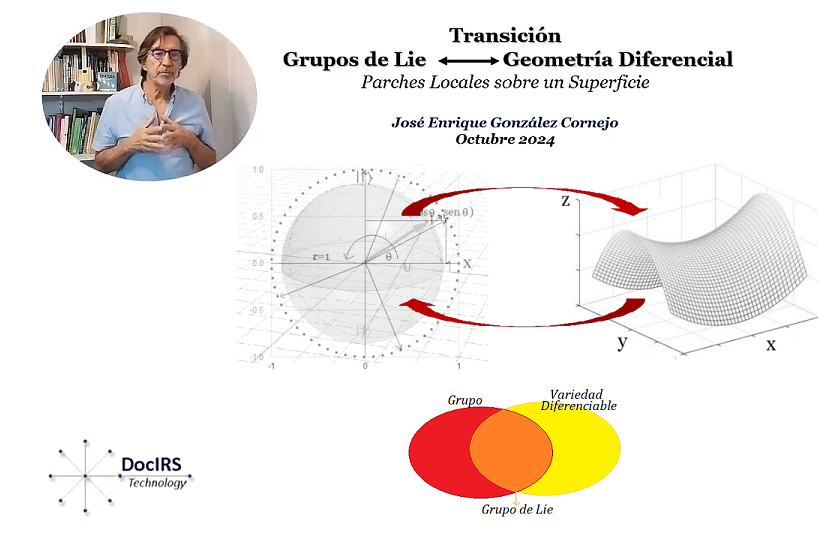
Transición Variedad Diferenciable $\large{\mapsto}$ Grupo de Lie
La geometría diferencial se encuentra en los fundamentos de diversas ramas de las matemáticas, haciendo uso de conceptos provenientes de la Teoría de Lie y la Topología, como las transformaciones entre espacios. En esta serie de artículos, exploramos la relación entre las variedades diferenciables1 y los grupos de Lie.
En una primera parte, se abordó la transición desde los Grupos de Lie hacia la Geometría Diferencial. En esta segunda parte, nos enfocaremos en el proceso inverso: la transición de una variedad diferenciable hacia un grupo de Lie, resaltando la interacción entre su estructura diferencial y su estructura algebraica.
Para ello, se introduce el concepto de variedad diferenciable como un espacio topológico suavemente parametrizable y se describe cómo la estructura de grupo se incorpora a través de operaciones compatibles con la diferenciabilidad.
Además, se presentan los fundamentos del álgebra de Lie asociada y su papel en la descripción de la estructura local del grupo, destacando la importancia del mapa exponencial en la conexión entre el álgebra de Lie y el grupo de Lie.
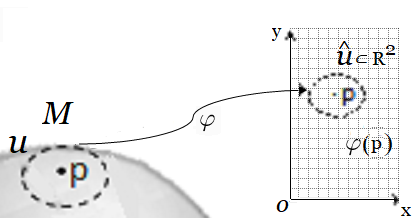
Finalmente, se analiza el caso particular del grupo de rotaciones $SO(3)$ y un ejemplo en coordenadas cartesianas en el plano $\mathbb {R^2}$
de una variedad diferenciable suave, pero irregular. Ambos, como ejemplos ilustrativos que muestran la aplicación concreta de los conceptos presentados.
En síntesis, la transición de una variedad diferenciable a un grupo de Lie implica dotar a la variedad de una estructura algebraica adicional, estableciendo así un puente entre la geometría y el álgebra.
- Una variedad diferenciable es un espacio topológico2 que localmente es similar a un espacio euclidiano y tiene una estructura diferencial definida globalmente.
Esto significa que alrededor de cada punto hay un entorno que puede mapearse suavemente a $\mathbb{R}^n$ y estos mapas (cartas) son compatibles donde se superponen3.
Estructura de Grupo
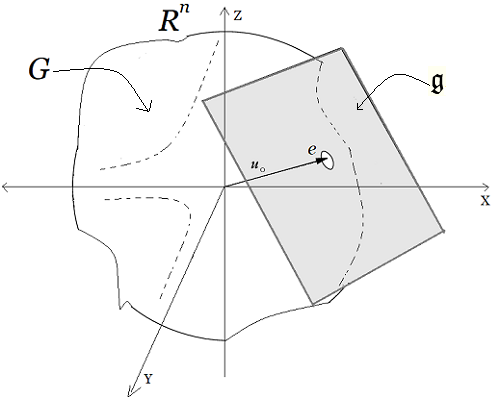
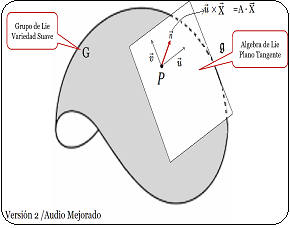
- Un grupo de Lie4 es una variedad diferenciable que también es un grupo, donde las operaciones del grupo (multiplicación e inversión) son suaves con respecto a la estructura diferencial de la variedad. Específicamente, si $G$ es un grupo de Lie, entonces los mapas son suaves:
$$
\mu: G \times G \to G \quad \text{(multiplicación)} \quad \mu(g h) = gh
$$
$$
\iota: G \to G \quad \text{(inversión)} \quad \iota(g) = g^{-1}
$$
Compatibilidad Estructuras
- El paso clave es asegurar que las operaciones del grupo sean compatibles con la estructura diferenciable. Esto significa que los mapas de multiplicación e inversión deben ser suaves en el sentido de la estructura diferencial de la variedad.
Esta compatibilidad garantiza que las operaciones del grupo no introduzcan "pliegues" o discontinuidades que violarían la suavidad requerida para una variedad diferenciable.
Álgebra de Lie
- Asociado a cada grupo de Lie está su álgebra de Lie que es el espacio tangente en el elemento identidad del grupo.
El álgebra de Lie captura la estructura infinitesimal del grupo y proporciona una versión linealizada de las operaciones del grupo.
El álgebra de Lie es un espacio vectorial equipado con una operación bilineal llamada corchete de Lie que codifica la estructura del conmutador del grupo.
- El mapa exponencial conecta el álgebra de Lie con el grupo de Lie. Mapea elementos del álgebra de Lie (vectores tangentes en la identidad) a elementos del grupo de Lie.
Este mapa es crucial porque permite estudiar la estructura del grupo examinando su álgebra de Lie que a menudo es más sencilla de manejar.
- Ejemplos de grupos de Lie incluyen el grupo lineal general $GL(n,\mathbb{R})$ (el grupo de matrices invertibles $n \times n$) el grupo ortogonal especial $SO(n)$ (el grupo de matrices de rotación) y el grupo unitario $U(n)$ (el grupo de matrices unitarias). Cada uno de estos es una variedad diferenciable con una estructura de grupo suave.
En resumen, el paso de una variedad diferenciable a un grupo de Lie implica equipar la variedad con una estructura de grupo donde las operaciones del grupo son suaves con respecto a la estructura diferencial de la variedad.
Esta combinación de propiedades algebraicas y geométricas diferenciales hace que los grupos de Lie sean herramientas poderosas tanto en matemáticas como en física teórica.
Ejemplos: Variedad Diferenciable $\longrightarrow$ Grupo de Lie
Se desarrolla un ejemplo simple utilizando el grupo de Lie $SO(3)$ que es el grupo de rotaciones en el espacio tridimensional. Este grupo es un caso clásico y muy útil para ilustrar los conceptos mencionados anteriormente.
Variedad Diferenciable Ejemplo
- $SO(3)$ es una variedad diferenciable de dimensión 3. Esto se debe a que una rotación en 3D puede describirse con 3 parámetros (por ejemplo los ángulos de Euler o un vector de rotación). Localmente $SO(3)$ se parece a $\mathbb{R}^3$, pero globalmente tiene una topología más complicada (es un espacio compacto y conexo)5.
Estructura de Grupo Ejemplo
- $SO(3)$ es un grupo de Lie porque:
i) Es un grupo: las rotaciones pueden componerse (multiplicación de matrices) y cada rotación tiene una inversa (la matriz inversa que también es una rotación).
ii) Las operaciones de multiplicación e inversión son suaves. Por ejemplo, si $R_1 R_2 \in SO(3)$. Entonces $R_1 \cdot R_2$ es una matriz de rotación cuya dependencia en $R_1$ y $R_2$ es suave. Lo mismo ocurre con la inversa $R^{-1}$.
Compatibilidad Estructuras Ejemplo
- La multiplicación de matrices en $SO(3)$ es suave porque las entradas de la matriz resultante son funciones polinómicas de las entradas de las matrices originales. La inversión también es suave porque la matriz inversa de una matriz de rotación es su transpuesta que es una operación lineal y por lo tanto suave.
Algebra de Lie Ejemplo
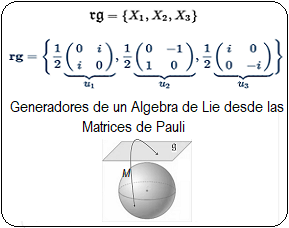
- El álgebra de Lie asociada a $SO(3)$ es el espacio de matrices antisimétricas $3 \times 3$ denotado como $\mathfrak{so}(3)$. Este espacio es el espacio tangente a $SO(3)$ en la identidad (la matriz identidad $I$).
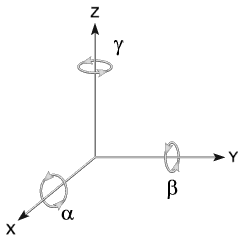
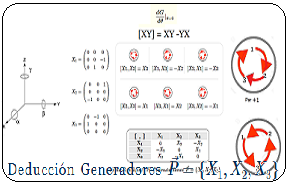
- Una base típica de $\mathfrak{so}(3)$ está dada por las matrices:
- Estas matrices corresponden a rotaciones infinitesimales alrededor de los ejes $x$, $y$ y $z$ respectivamente.
- El corchete de Lie en $\mathfrak{so}(3)$ es el conmutador de matrices:
$$[A B] = AB - BA$$
Es decir, se conmutan estas tres matrices con la operación binaria corchetes de Lie6, a fin de obtener los generadores infinitesimales y sus permutaciones del álgebra de Lie $\large{\mathfrak {g}}$, asociado a los grupos especiales ortogonales de dimensión $SO(3)$ (Special Orthogonal Group of Dimension 3)
7.
Proceso Animado Generadores Algebra de Lie $\large{SO(2) \mapsto SO(3)}$
Mapa Exponencial Ejemplo
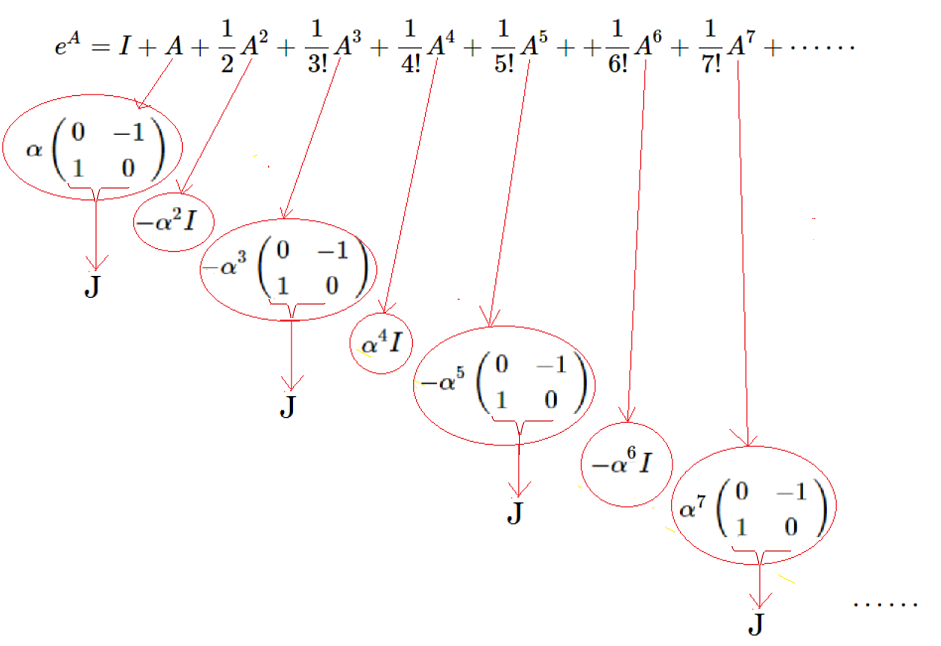
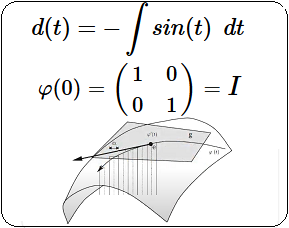
- El mapa exponencial conecta el álgebra de Lie $\mathfrak{so}(3)$ con el grupo de Lie $SO(3)$. Para una matriz $A \in \mathfrak{so}(3)$ el mapa exponencial se define como:
$$
\large{e}^{A} = I + A + \frac{A^2}{2!} + \frac{A^3}{3!} + \cdots.
$$
Como se desmuestra en Grupo de Lie- Enfoque Exponencial , donde $\large{e}^{A}=M$, donde:
- Este mapa produce una matriz de rotación en $SO(3)$. Por ejemplo, si $A = \theta · X_3$ (una rotación infinitesimal alrededor del eje $z$), entonces:
iii) Grupo de Lie: $R$ es un elemento de $SO(3)$, es decir una rotación válida en 3D.
Resumen del Ejemplo 1:
En este ejemplo se ha visto cómo:
i) $SO(3)$ es una variedad diferenciable con una estructura de grupo suave.
ii) El álgebra de Lie $\mathfrak{so}(3)$ describe rotaciones infinitesimales.
iii) El mapa exponencial conecta el álgebra de Lie con el grupo de Lie permitiendo construir rotaciones finitas a partir de rotaciones infinitesimales.
Se ilustra cómo los conceptos de variedad diferenciable grupo de Lie, álgebra de Lie y mapa exponencial se entrelazan en el contexto de $SO(3)$.
Ejemplo 2
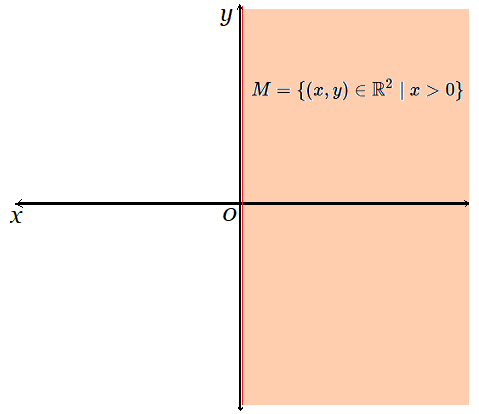
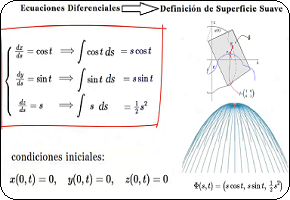
- A continuación se ilustra un ejemplo en el plano $\mathbb{R}^2$ de una variedad diferenciable suave, pero irregular (es decir, que no es una esfera ni una subvariedad "estándar") y que, a través de una transformación adecuada, demuestra ser un grupo de Lie , es el grupo afín multiplicativo en $\mathbb{R}^2$.
Considérese el conjunto:
$$
M = \{ (x, y) \in \mathbb{R}^2 \mid x > 0 \}
$$
Este conjunto representa el semiplano derecho, excluyendo el eje $ x = 0 $. Es una variedad diferenciable suave , ya que es un subconjunto abierto de $\mathbb{R}^2$ y hereda una estructura diferenciable canónica. Sin embargo, es irregular en el sentido de la simetría , ya que no es invariante bajo rotaciones como la esfera o el círculo.
Ahora, se define una operación de grupo sobre $M$, inspirada en las transformaciones afines. Definimos la siguiente operación binaria:
$$
(x_1, y_1) \circ (x_2, y_2) = (x_1 x_2, y_1 + x_1 y_2).
$$
- El elemento neutro es $ (1, 0) $, ya que para cualquier $ (x, y) \in M $:
$$
(x, y) \circ \left(\frac{1}{x}, -\frac{y}{x} \right) = \left( x \cdot \frac{1}{x}, y - x \frac{y}{x} \right) = (1, 0).
$$
- La operación es suave (diferenciable) en $ \mathbb{R}^2 $, lo que lo convierte en un grupo de Lie.
La interpretación Geométrica de este grupo, aparece en forma naturalen transformaciones afines de la recta real $ \mathbb{R} $ de la forma:
$$
f_{(x, y)}(t) = x t + y, \quad \text{para } t \in \mathbb{R}.
$$
La composición de estas funciones satisface exactamente la regla de grupo definida.
De ese modo, el grupo afín multiplicativo en $ \mathbb{R}^2 $ es una variedad diferenciable irregular, pero al mismo tiempo un grupo de Lie no compacto .





 Video:Grupos de Lie ~ Geometría Diferencial
Video:Grupos de Lie ~ Geometría Diferencial